Newsletter Institut für Raumfahrtsysteme
Newsletter
Eine Anmeldung bei unserem Newsletter ist zur Zeit leider nicht möglich.
Falls Sie sich abmelden möchten, genügt eine E-Mail an Newsletter mit dem Betreff "Newsletter abmelden".
Aktuelle Ausschreibungen studentischer Arbeiten und Stellenangebote
Raumfahrt aus Leidenschaft
Raumfahrt aus Leidenschaft Veranstaltungen:
25. Januar 2024, 17:30 Uhr, RZBW - Mediathek:
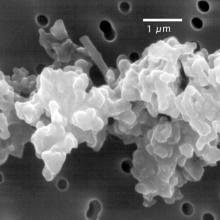
- OSIRIS-REX SAMPLE RETURN: Beobachtungen, Dr.-Ing. S. Löhle, Dr.-Ing. M. Eberhart, F. Grigat
(Eine online-Teilnahme ist über den folgenden Link ebenfalls möglich: https://unistuttgart.webex.com/unistuttgart/j.php?MTID=m717a6a9e8bb4d895f6be068818bd338a)
24. Januar 2024, 17:30 Uhr, Pfaffenwaldring 27, V27.02:
- World Record made in Stuttgart: Entwicklung, Bau und Start der N2ORTH Experimentalrakete, Philipp Jochum
Um auf den Inhalt vom Kurs zuzugreifen, bitten wir um die Anmeldung in ILIAS:
https://ilias3.uni-stuttgart.de/goto_Uni_Stuttgart_crs_2683591.html