Die Robotik-Projekte des Instituts
Forschungsbereiche
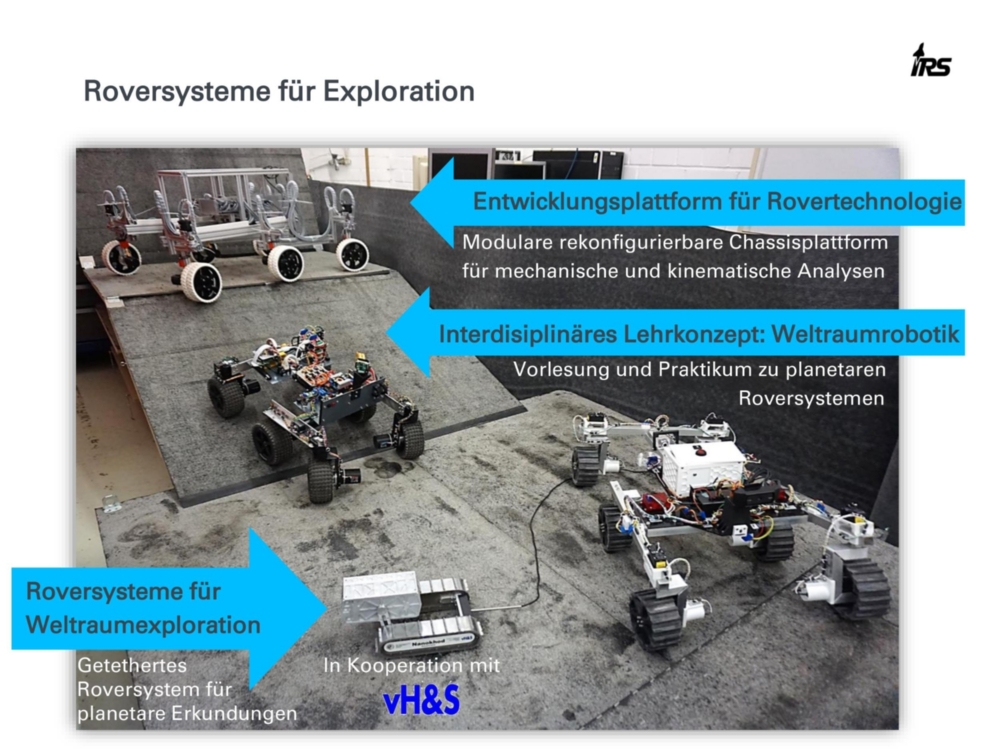
Design, Entwicklung und Betrieb von robotischen Raumfahrtsystemen
- Nanokhod Microrover Entwicklung für eine Mondmission im Kooperation mit vH&S
- Rover Chassis Design & Performance Analysen
- Entwicklung von robotischen Manipulator Armen & Greifern für Instrumenten- & Probenhandling
- Entfaltbare Kameramasten für Umgebungserfassung und Navigation
Mechanismen-Design, Integration & Testing
- Miniaturisierte Aufspulmechanismen für Raumfahrtanwendungen
- Hochintegrierte staubdichte Antriebseinheiten
- Entfaltungsmechanismen für ein DLR LIBS Instrument
Sensorik-Komponenten Entwicklung und Betrieb
- Tiefen und LIDAR Kameraeinsatz für Navigation & Tracking
- Interfakultäre Entwicklung von Micro-Radarsensoren
- Umgebungsmodellierung, Datenfusion und Feedback Monitoring
Software-Entwicklung
- Robotik Control Framework für Raumfahrtandwendungen
- Schnittstellenimplementierung zum autonomen Betrieb von Raumfahrtsystemen
Testumgebung
- Modulare Teststrecke für Mobility-Analysen
- Soft-Soil Testbetten
- Lunar Regolith Simulant Testkammer
Simulationsumgebung
- Verifikation von Steuerungsalgorithmen
- Simulation von physikalischen Umgebungsmodellen
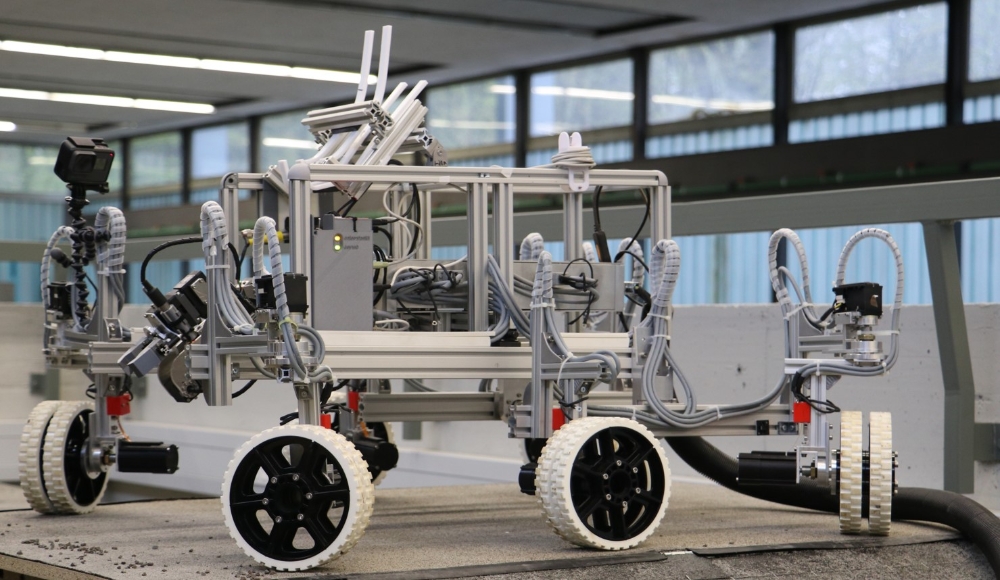
Modular Rover Chassis Platform
Kontakt
Moritz Gewehr
M.Sc.
Sabine Klinkner
Prof. Dr.-Ing.Stellvertretende Geschäftsführende Direktorin, Professorin für Satellitentechnik