Der Flying Laptop hat insgesamt sieben Systeme, die den Kleinsatelliten am Laufen halten. Diese Systeme sind der Bordrechner, die Bordsoftware, die Energieversorgung, die Kommunikation, die Lageregelung, die Struktur und Mechanismen und die Thermalkontrolle.
Bordrechner
Das Bordrechnersystem (OBC) des Flying Laptop hat die Aufgabe, Berechnungen und Datenverarbeitung sowie Statuskontrolle der Subsysteme an Bord durchzuführen. Da der Satellit den Weltraumbedingungen ausgesetzt sein wird, müssen alle Systeme inklusive OBC robust genug sein, um Weltraumstrahlung und einen großen Temperaturbereich unbeschadet zu überstehen. Deshalb wird ein bereits weltraumqualifizierter Prozessor als Kern des Bordrechnersystems eingesetzt. Der Mikroprozessor UT699 basiert auf der bereits erfolgreich im All eingesetzten und von der ESA/ESTEC entwickelten Familie der LEON Prozessoren, Nachfolger der ERC32 Prozessoren. Sowohl der Prozessor als auch die nahe am Prozessor gelegenen Speichereinheiten befinden sich auf der Bordrechnerkernplatine. Diese Platine wird von Aeroflex Colorado Springs aus den USA entworfen und geliefert. Der Bordrechner führt die Algorithmen des Lageregelungssystems und des Thermalkontrollsystems aus. Er steuert den dedizierten Nutzlastrechner an und übernimmt die Überwachung der Betriebsdaten und die Fehlererkennung, Isolation und Kompensierung (FDIR) im Falle einer Fehlfunktion. Die Telemtriedaten werden gespeichert und bei Bedarf an die Bodenstation übermittelt.
Die Prozessorplatine des Bordrechners besitzt lediglich SpaceWire-Schnittstellen um Daten zu senden und zu empfangen. Daher befindet sich eine separate Schnittstellen-Platine zwischen der Bordrechnerkernplatine und den Subsystemen des Flying Laptop. Diese Platine wird mit einer SpaceWire-Schnittstelle auf der einen und den entsprechenden Schnittstellen für jedes Subsystem, wie LVDS oder I²C, auf der anderen Seite ausgestattet sein. Diese Schnittstellen-, oder I/O-Platine übermittelt lediglich bei einem Schreib oder Lesebefehl des Bordrechnersystems die zu ihr gesandten Daten. Des weiteren sind auf der I/O-Platine Speicherbausteine vorhanden, um Telemtriedaten zwischenzuspeichern. Die I/O-Platine wird entwickelt und geliefert von 4Links Ltd. aus Großbritannien.
Für die Kommunikation mit der Bodenstation wird eine dedizierte Platine mit einem CCSDS Preprozessor im Bordrechnersystem eingesetzt. Dieser übernimmt die Data Link Schicht des CCSDS Satelliten-Kommunikationsprotokolls. Die Verwendung dieses Protokolls gewährleistet die Kompatibilität zu vielen Bodestation, z.B. der ESA. Die von 4Links entwickelte und gelieferte Platine wird mit einem CCSDS Chip von Aeroflex Gaisler aus Schweden bespielt und wird ebenfalls über eine SpaceWire Schnittstelle mit der Kernplatine verbunden.
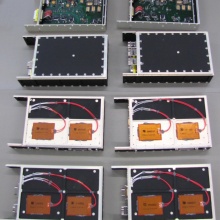
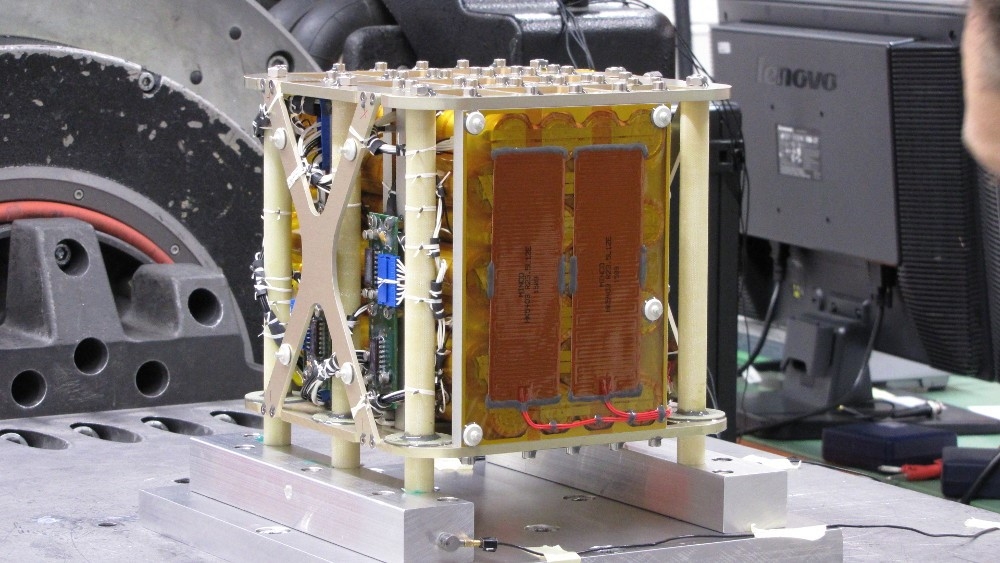
Alle Platinen werden zweifach ausgeführt (siehe Bild im Seitenheader). Dies ermöglicht es, zwischen den betreffenden Einheiten umzuschalten, um ein redundantes System zu erhalten und auftretende Fehlfunktionen kompensieren zu können. Bis auf die Kommunikationsplatinen werden alle Bordrechnerplatinen in kalter Redundanz betrieben.
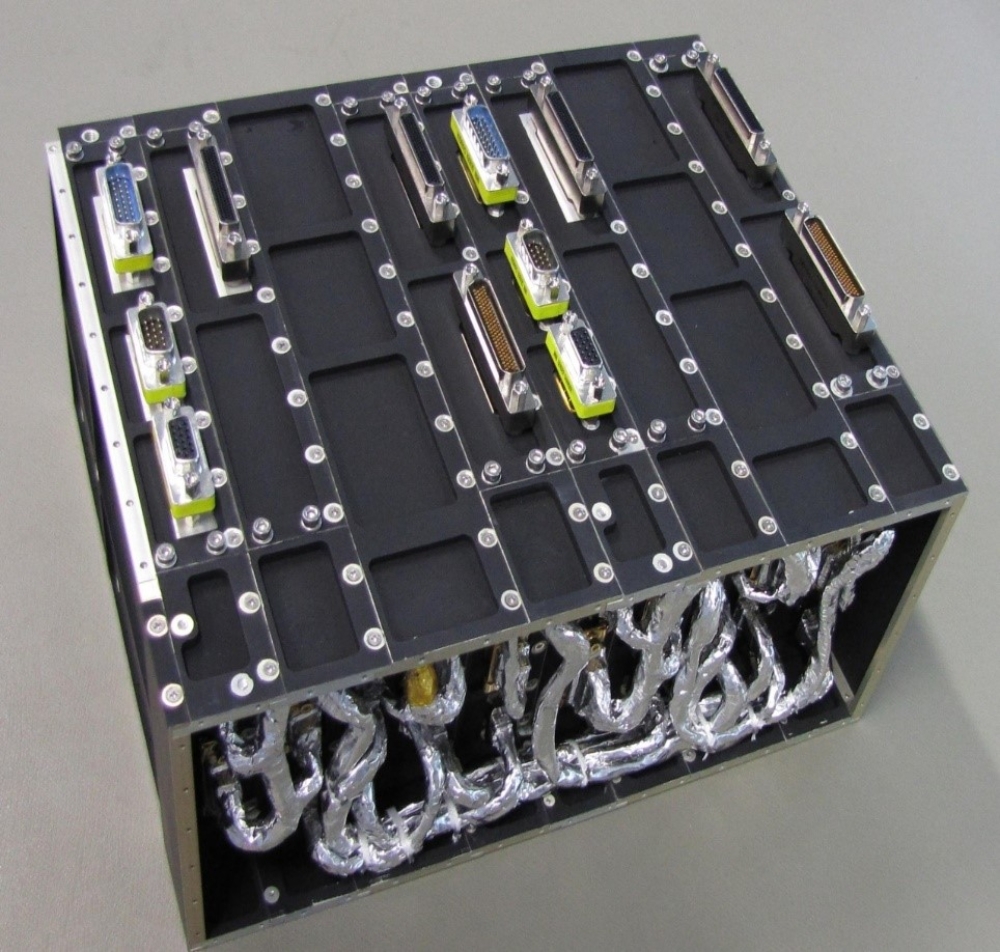
Weil auf dem Flying Laptop ein unregulierter Spannungsbus zum Einsatz kommt, gibt es zur Versorgung der 6 Bordrechnerplatinen 2 identische Stromversorgungsplatinen, die die benötigten Kleinspannungen erzeugen und weiterleiten. Insgesamt gibt es also im FLP Bordrechner 8 Platinen, wie auf dem Bild zu sehen. Diese 8 Platinen sind über einen speziell entwickelten Mikro-Kabelbaum verbunden. Dieser ist im obersten Bild zu sehen. Aufgrund der signifikant kleinen Abmaße und damit dem sehr geringen zur Verfügung stehenden Raum wird der interne OBC-Kabelbaum von der Firma HEMA Kabeltechnik aus Salem am Bodensee entwickelt und geliefert. Auf der Rückseite jeder zweiten Platine befinden sich Notfallheizer, die im Fall einer zu geringen Temperatur im Bereich des OBC aktiviert werden und das Bordrechnersystem heizen können. Auch dieses Heizsystem wurde in Redundanz installiert und wird von der PCDU automatisch aktiviert.
Bordsoftware
Die Bord-Software eines Satelliten erfüllt die folgenden Aufgaben:
- Telekommandos können empfangen und ausgeführt werden.
- Es wird situations- und zustandsabhängig Telemetrie generiert.
- Die Sensoren und Aktuatoren des Satelliten können angesprochen werden.
- Kontrollalgorithmen werden ausgeführt.
- Fehler müssen erkannt und isoliert werden.
Die hierfür benötigte Software-Entwicklung findet vollständig am Institut für Raumfahrsysteme (IRS) statt. Dabei wird es den Studenten ermöglicht, direkt am Implementierungsprozess der Bordrechnersoftware (OBSW) teilzunehmen. Sie nutzt das Betriebssystem RTEMS als Basis und ist vollständig in objektorientiertem C++ geschrieben. Zur Kommandierung und Überwachung der Systeme wird der ECSS PUS Standard umgesetzt. Ein offenes Modekonzept ermöglicht es, nicht nur einzelne Systemmodes zu definieren, sondern auch einzelne Komponenten unabhängig in Modes zu kommandieren.
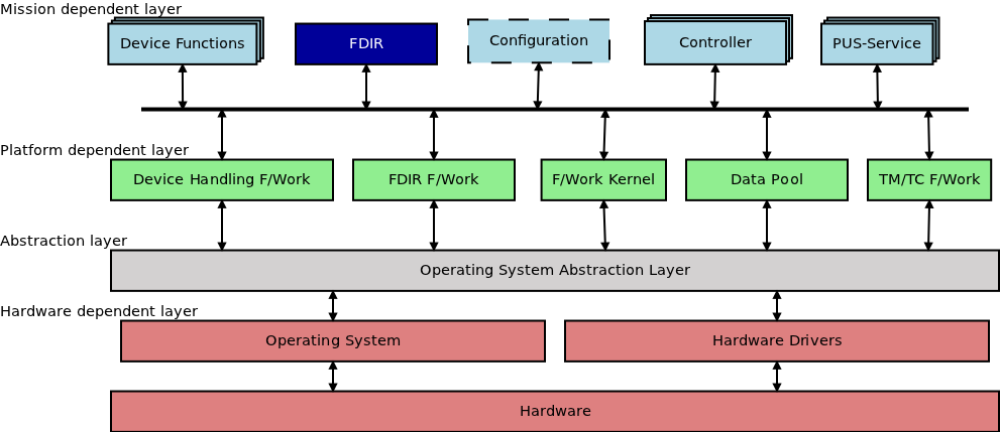
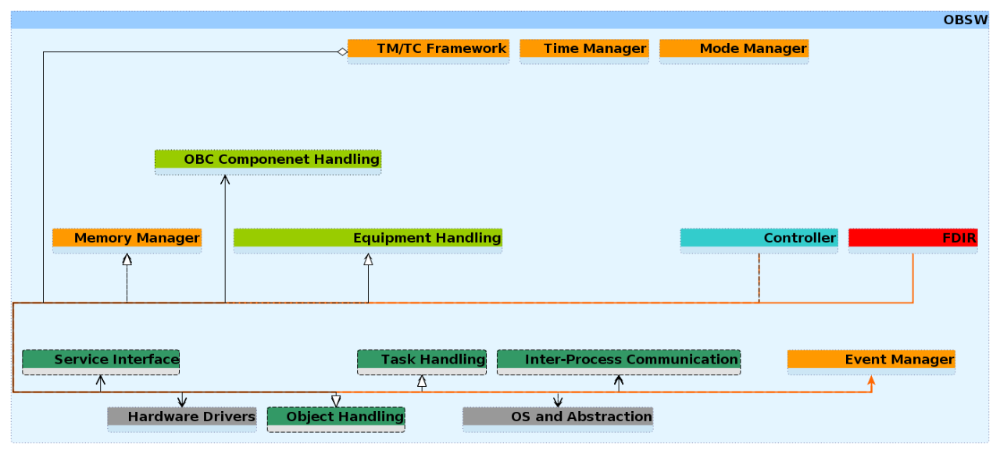
Die Software ist sowohl schichten-, als auch komponentenbasiert aufgebaut:
Durch die Schichtung wird Hardwareabstraktion und Wiederverwendbarkeit ermöglicht. Die niedrigste Schicht arbeitet direkt auf der Hardware, währen die höheren Schichten abstrakte Funktionalitäten zur Verfügung stellen. Dabei verfolgt die sogenannte Plattformschicht die Idee, ein Framework für ähnliche Satellitenanwendungen zu bieten, das von der Missionsschicht verwendet und erweitert werden kann. Zum anderen sind jeweils funktional zusammengehörige Elemente in der Software in Komponenten gegliedert, die bestimmte Features zur Verfügung stellen und kapseln. Ein Bespiel ist die Geräteverwaltung, die z.B. den Hoch- und Runterfahrprozess jedes Geräts kapselt.
Energieversorgung
Die elektrische Energieversorgung des Flying Laptop wird über drei Solarpaneele sichergestellt, die von Airbus Defence and Space gefertigt wurden. Ein Solarpaneel ist body-mounted, zwei Solarpaneele wurden nach dem Start im Orbit entfaltet. Der Flying Laptop besitzt eine unregulierte Busspannung von 19V bis 26V. Die erforderliche Spannung für die Geräte wird dann über einen DC/DC-Wandler direkt an der Komponente erzeugt.
Die Energiekontroll- und –Verteilungseinheit, die sogenannte Power Control and Distribution Unit (PCDU) wurde von Vectronic Aerospace hergestellt. Sie detektiert die Separation von der Startrakete, reguliert die Energieverteilung zu den Komponenten und überwacht das Laden der Batterie. Über diese Standardaufgaben hinaus erfüllt sie aber auch noch weitere Funktionen. Sie erfasst Daten, Ströme und Spannungen der meisten Satellitensensoren und leitet diese an den Bordcomputer zur Auswertung weiter. Neben dem Bordcomputer ist die PCDU die zweitwichtigste Kontrolleinheit des Satellitensystems, die in Notfällen auch die redundanten Komponentenzweige aktivieren kann. Vor allem kann in einem Fehlerfall des Bordrechnersystems auf die verfügbaren Redundanzen umgeschaltet werden. Die PCDU besitzt eigens dazu Schnittstellen um die sogenannten ‚High Priority Commands‘ (HPCs) zu empfangen. Die HPCs werden ohne Umweg über den Bordrechner dekodiert und an die PCDU gesandt, sodass diese auch bei Ausfall der meisten Systeme essentielle Telekommandos empfangen und ausführen kann.
Als sekundäre Energiequelle befindet sich an Bord des Flying Laptop eine Batterie (siehe Bild), die aus drei voneinander unabhängigen Batteriestrings aus Lithiumeisenphosphatzellen besteht. Die Batteriezellen wurden von A123 Systems hergestellt (Typ: ANR26650M1-B). Jeder dieser Strings ist direkt mit einem der Solarpaneele verbunden. Da das mittlere Paneel weniger Energie liefert als die ausklappbaren Paneele, besteht der Batteriestring für dieses Paneel aus 28 Zellen und die Strings für die ausklappbaren Paneele aus jeweils 35 Zellen. Insgesamt wird eine Spannung zwischen 19V und 26V bei einer Gesamtkapazität aller drei Strings von gut 700Wh erreicht. Eine zusätzliche Elektronik sorgt für einen Ausgleich der Zellspannungen und meldet an die PCDU, wenn eine Zelle die maximale Spannung erreicht hat, so dass das Laden rechtzeitig abgebrochen werden kann. Die Batterie wird benötigt, um den Satelliten in den Schattenphasen mit Energie zu versorgen und um bei Anwendungen mit sehr hoher Leistungsaufnahme kurzzeitig die benötigte Energie bereit zu stellen.

Kommunikation
In der Satellitenkommunikation werden in der Regel zwei Bereiche unterschieden: das Telemetry, Tracking and Control (TT&C) System und das Payload Daten Downlink System. Das TT&C-System wird für die Übertragung der Housekeeping Daten (Zustandsdaten des Satelliten), dem Empfang der Kommandos und zur Positions- bzw. Orbitbestimmung verwendet. Es muss äußerst zuverlässig arbeiten, muss dafür aber nicht allzu hohe Datenraten von einigen kbit/s für den Uplink (Boden -> Satellit) und etwa 100kbit/s für den Downlink (Satellit -> Boden) erreichen. Wird kein Tracking System verwendet, spricht man auch häufig vom s.g. TM/TC System. Das Payload Daten Downlink System hingegen wird ausschließlich für die Übertragung der Nutzlastdaten verwendet. Die Anforderungen an die Zuverlässigkeit sind hier nicht ganz so hoch, dagegen müssen höhere Datenraten erzielt werden.
TM/TC-System
Das TM/TC System des Flying Laptop ist ein hochzuverlässiges kommerzielles System, das auf Frequenzen im kommerziellen S-Band zwischen 2.0 GHz und 2.3 GHz mit einer Datenrate von 128kbit/s empfängt und mit 4kbit/s sendet. Zur Erhöhung der Zuverlässigkeit sind Empfänger und Sender jeweils doppelt vorhanden, so dass bei einem Ausfall einer Einheit die Funktionalität des TT&C Systems noch gegeben ist. Damit in jeder möglichen Fluglage sichergestellt ist, dass der Funkkontakt zum Satelliten hergestellt werden kann, besitzt der FLP zwei Stabantennen mit annähernd hemisphärischer Charakteristik.
|
|
TM downlink |
TC uplink |
Antenne |
|
Frequenz |
2263.5 MHz |
2083.5 MHz |
|
|
Bandbreite |
350 kHz |
8 kHz |
|
|
Datenrate (netto) |
56 kbps |
4 kbps |
|
|
Modulation |
BPSK (NRZ-L) |
PM (16 kHz BPSK Subträger) |
|
|
Codierung |
CCSDS (Conv. R=1/2,K=7 & R.S. 255/223) |
CCSDS (BCH 63/56) |
|
|
Sensitivität / Ausgangsleistung |
-118 dBm |
28 dBm |
|
|
benötigtes Eb/N0 |
4.5 dB |
13.5 dB |
|
|
Polarisierung |
|
|
RHCP |
|
Maximialer Gewinn |
|
|
5 dBi |
|
3dB Keulenbreite |
|
|
110° |
Payload Daten Downlink System
Das Payload Daten Downlink System (DDS) soll die von der Nutzlast gesammelten Daten, insbesondere größere Mengen an Bilddaten von der MICS oder der PAMCAM, an eine Bodenstation übertragen. Hierbei werden höhere Datenraten von bis zu 10Mbit/s angestrebt. Da sowohl der Bauraum als auch die elektrische Energie begrenzt sind, wird eine Hornantenne mit Richtcharakteristik eingesetzt, die in Hauptstrahlrichtung einen deutlich höheren Antennengewinn aufweist als zum Beispiel die Stabantennen des TT&C-Systems. Daher muss der Satellit aber auch auf eine empfangsbereite Bodenstation ausgerichtet werden, wenn die Bilddaten zur Erde übertragen werden sollen.
Das DDS ist auf S-Band Amateurfunkfrequenzen zwischen 2.40 GHz und 2.45 GHz ausgelegt. Es bekommt die zu übertragenden Nutzlastdaten sowie das Taktsignal vom Payload On-Board Computer (PLOC). Das System wurde komplett am IRS entwickelt und basiert auf COTS Komponenten.
|
|
DDS downlink |
Antenne |
|
Amateurfunk-Rufzeichen |
DP0FLP |
|
|
Frequenz |
2408.0 MHz |
|
|
Bandbreite |
10 MHz |
|
|
Datenrate (netto) |
5.5 Mbps |
|
|
Modulation |
QPSK (NRZ-L, SRRC α=0.4) |
|
|
Codierung |
CCSDS (R.S. 255/223 IL=5) |
|
|
Ausgangsleistung |
30 dBm |
|
|
benötigtes Eb/N0 |
7.8 dB |
|
|
Polarisierung |
|
LHCP |
|
max. Gewinn |
|
13.5 dBi |
|
3dB-Keulenbreite |
|
15° |
Lageregelung
Der Satellit wird mit Reaktionsrädern und Magnettorquern dreiachsenstabilisert.
Die vier Reaktionsräder sind in einer Tetraederkonfiguration angeordnet um Redundanz zu gewährleisten. Dies macht es möglich den Ausfall eines Rades zu kompensieren. Die Magnettorquer (Magnetspulen) werden hauptsächlich verwendet, um den sich über die Zeit in den Reaktionsrädern ansammelnden Drall abzubauen. Sie werden aber auch dazu verwendet, den Satelliten in der LEOP (Launch and Early Operations = Start und frühe Operationsphase) nach der Trennung von der Trägerrakete zu stabilisieren, denn alle aufwändigeren Systeme (wie die Reaktionsräder) sind in dieser Phase abgeschaltet.
Die Bewegungen des Flying Laptop werden von fünf Sensortypen überwacht:
- zwei dreiachsige Magnetometer
- ein 4π Sonnensensorsystem zur groben Bestimmung der Sonnenrichtung
- vier Faseroptische Kreisel zur Drehtratenmessung
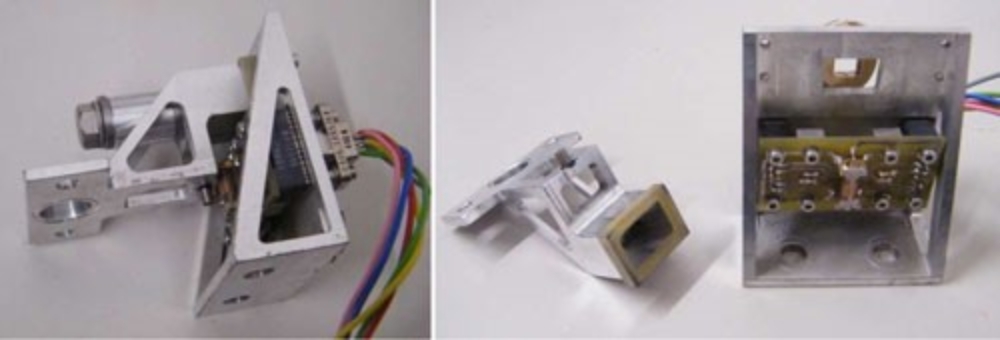
- ein Sternenkamerasystem mit zwei Kameraköpfen
- drei GPS Empfänger
Die ZARM AMR-Magnetometer verwenden magneto-resistive Sensoren und sind mit einer digitalen Schnittstelle ausgestattet. Zur Drehratenmessung werden ebenfalls vier Kreisel eingesetzt. Das Sternenkamerasystem der Technischen Universität Dänemark liefert eine relative Lagemessung mit einer Genauigkeit von bis zu 2 Bogensekunden. Wenn der Satellit stabilisiert ist und sich mit einer Geschwindigkeit von weniger als 1,2 °/s dreht, liefert das Sternenkamerasystem kontinuierliche Messwerte. Um die maximale Genauigkeit um alle drei Körperachsen zu gewährleisten und um die Wahrscheinlichkeit einer Blendung der Sternenkamera zu reduzieren, ist eine zweite Kamera so am Satelliten angebracht, dass ihre optischen Achsen in einem Winkel zueinanderstehen. Um eine genaue Zielausrichtung während Aufnahmen und Bodenstationskontakten zu erreichen ist der Flying Laptop mit einem GPS Navigationssystem bestehend aus drei unabhängigen Antennen und Phoenix Empfängern ausgestattet. Diese wurden am DLR/GSOC in Oberpfaffenhofen entwickelt.
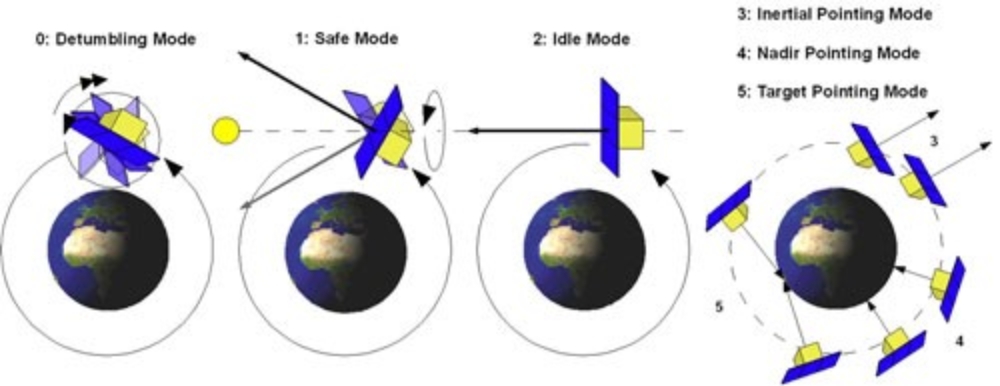
Das Lagekontrollsystem kann fünf verschiedene Modi kommandieren, die jeweils speziell auf die benötigte Operationsphase oder Notfallsituation zugeschnitten sind.
- Der Detumbling Mode (Mode 0) wird nach der Trennung von der Rakete und wenn der Satellit mit einer Drehrate von mehr als 3 °/s rotiert automatisch ausgelöst. der Flying Laptop misst mit den Magnetometern die Drehgeschwindigkeit und verringert diese mit den Magnettorquern.
- Der Safe Mode (Mode 1) wird von der Bodenstation oder von der automatischen Fehlererkennung kommandiert, sollte ein missionskritisches Problem auftreten. Um den Satelliten zu stabilisieren und die Ausrichtung der Solarzellen zur Sonne - und damit das Laden der Batterien - sicherzustellen bedient der Flying Laptop sich der Sonnensenoren, um die Achse des größten Trägheitsmomentes Richtung Sonne auszurichten. Die Magnetometer und Magnettorquer sorgen dann für eine Drehrate von 2 °/s um diese Achse. Dadurch wird sichergestellt, dass der Satellit diese stabile Lage auch bei auftretenden Störungen nicht verliert.
- Wenn der Satellit voll einsatzbereit ist, aber nicht benutzt wird, wird er in den Idle Mode (Mode 3) versetzt. Im Idle Mode werden die Solarzellenflächen mit den Reaktionsrädern, den Sternensensoren, Sonnensensoren und den Faseroptischen Kreiseln aktiv zur Sonne hin ausgerichtet. So werden die Batterien am effektivsten geladen und der Satellit ist jeder Zeit bereit Beobachtungen in den Pointing Modes auszuführen.
- Um Aufnahmen zu machen stehen wie oben gezeigt drei verschiedene Lagekontrollmodi zur Verfügung: der Inertial Pointing Mode (Mode 3), der Nadir Pointing Mode (Mode 4) und der Target Pointing Mode (Mode 5).
Im Target Pointing Mode ist der Satellit während des Überfluges auf ein festes Ziel auf der Erdoberfläche ausgerichtet. Die Drehrate ist maximal 1°/s und folgt einer nichtlinearen "Glockenkurve". Dies ist der anspruchsvollste Modus im Hinblick auf die Kontrollalgorithmik und die geforderte Lagegenauigkeit.
Im Nadir Pointing Mode zeigen die Nutzlastkameras "senkrecht nach Unten" (in Nadirrichtung) und im Inertial Pointing Mode können die Kameras (oder jede Seite des Satelliten) auf ein Ziel am Sternenhimmel (z.B. einen Stern, die Sonne oder den Mond) ausgerichtet werden. In diesem Modus dreht sich der Flying Laptop nicht, seine Lage wird inertial festgehalten. Die Sternenkameras, Faseroptischen Kreisel, das GPS und die Reaktionsräder werden in den Pointing Modes verwendet. Die Magnetometer und Magnettorquer können optional hinzugeschalten werden um die Reaktionsräder zu entsättigen.
Das Lagekontollsystem muss den wissenschaftlichen Erdbeobachtungsinstrumenten eine genaue Lagemessung (2,5 Bogensekunden) und eine Ausrichtgenauigkeit von 150 Bogensekunden zur Verfügung stellen. Darüber hinaus muss der Satellit sehr agil seine Lage wechseln können, was eine weitere Herausforderung an das Lagekontrollsystem eines Kleinsatelliten darstellt. Dies kann nur durch ein ausgeklügeltes Lagekontrollsystem und sehr akkuraten Sensoren und Aktuatoren erreicht werden. Neue Methoden zur Implementierung der Lagekontrollalgorithmen werden zur Zeit verfolgt.
Hauptstruktur
Die Satellitenhauptstruktur des Kleinsatelliten Flying Laptop ist als Hybridstruktur konzipiert. Sie ist aus gefrästen Aluminiumbauteilen und kohlenfaserstoffverstärkte Sandwichstrukturen aufgebaut. Der untere Teil besteht aus Aluminium und bietet dadurch kostengünstige und präzise Fertigung, angepasste Kraftleitungswege und gute thermische Eigenschaften. Im oberen Teil des Satelliten, in dem die optischen Systeme untergebracht sind, werden kohlenfaserstoffverstärkte Sandwichstrukturen eingesetzt. Diese weisen eine geringe Masse, hohe Steifigkeit sowie eine geringe thermische Längenausdehnung auf, so dass die justierte Ausrichtung der Kameras im Satelliten und zueinander gewährleistet ist.
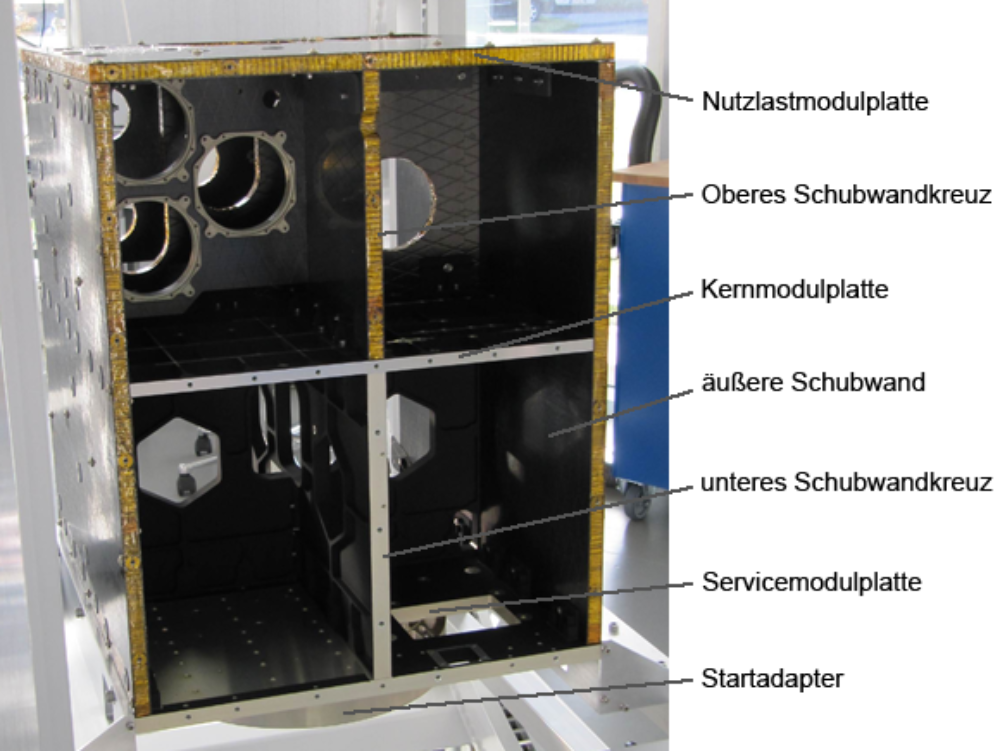
Der Satellit ist in drei Ebenen/Segmente aufgeteilt. Der Startadapter ist am Servicemodul befestigt, auf dem die so genannten Servicekomponenten wie der Bordrechner, die Batterie oder die Energieverteilungseinheit untergebracht sind. Das zweite Segment, das Kernmodul, befindet sich in der Satellitenmitte und beherbergt Systemkomponenten, wie die Reaktionsradeinheit, das Datenkommunikationssystem oder die faseroptische Kreiseleinheit. Das Nutzlastmodul bildet die oberste Ebene der Satellitenhauptstruktur. An diesem Modul sind die Panoramakamera, das optische Kommunikationssystem OSIRIS sowie die beiden optischen Bänke mit dem optischen Kamerasystem MICS und den Sternenkameras befestigt. Um die Ausrichtung der Kamerasysteme zueinander zu gewährleisten, besteht das Nutzlastmodul aus Sandwichstruktur mit quasi-isotrop aufgebauten Deckschichten, deren Faservolumenanteil so gewählt ist, dass ein thermischer Ausdehnungskoeffizient nahe Null in alle Ebenenrichtungen besteht.
Verbunden werden die drei Segmente via zweier Schubwandkreuze und durch zwei äußere Schubwände. Das Schubwandkreuz zwischen Service- und Kernmodul besteht wie die beiden Segmente aus gefrästem Aluminium. Die weiteren Schubwände sind aus Sandwichstrukturen aufgebaut, um die Auswirkung der thermischen Verformung auf das Nutzlastmodul weitest gehend zu reduzieren. Verbunden werden Sandwich- und Aluminiumbauteilen durch schwimmende Verbindungselemente, die die auftretenden inneren Verspannungen durch die stark verschiedenen thermischen Ausdehnungskoeffizienten kompensieren.
Entfaltmechanismus
Aufgrund des begrenzten Einbauraumes in der Rakete müssen die drei Solarpaneele während des Starts an den Satellitenkörper anliegen. Im Orbit werden die beiden äußeren Solarpaneele um 90° entfaltet und spannen mit dem mittleren Paneel eine Ebene auf. Dieser Vorgang wird mit Hilfe des Entfaltmechanismus durchgeführt, der je Paneel aus zwei Scharnieren und zwei Niederhaltern besteht. Als Niederhalter bzw. Auslösemechanismus wird ein neuartiger Schmelzdrahtmechanismus verwendet. Der Solarpaneelhaltebolzen wird durch eine geteilte Hülse an den Satellitenkörper gehalten. Diese Hülse wird während des Starts durch eine Schmelzschnur zusammengehalten. Im Orbit wir die Schnur durch Heizwiderstände geschmolzen, die Hülsenteile werden freigegeben und der Bolzen wird mit Hilfe einer Druckfeder aus der Hülse gezogen, so dass das Solarpaneel durch die vorgespannten Scharniere entfalten kann. Die Scharniere sind als Fest- und Losgelenk ausgelegt und durch Schenkelfedern vorgespannt. Ein Dämpfer nimmt Rotationsenergie durch plastische Verformung auf, sodass ein Einschwingen unterbunden wird. Die Paneele werden durch Federvorspannung gehalten. Durch die Verwendung von Kugelgelenke kann das Scharniersystem Achsabweichungen von bis zu 1° ausgleichen. Das gesamte Entfaltsystem besitzt eine Masse von unter 2 kg und eine elektrische Leistung von 64 W für ca. 30 s.
Deorbitmechanismus
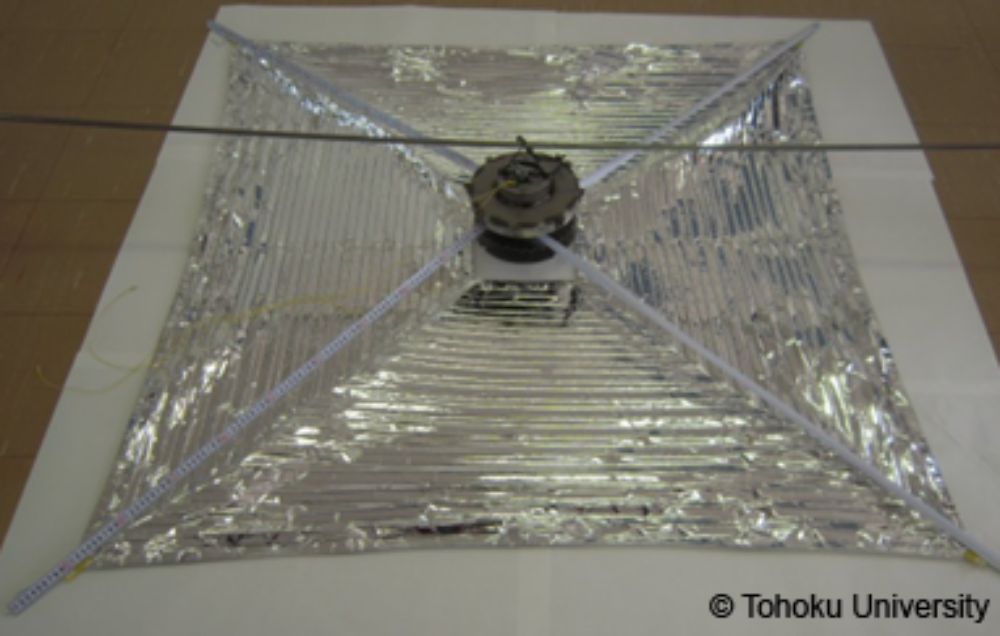
Das „Inter-Agency Space Debris Coordination Committee“ der Vereinten Nationen verabschiedete im Jahr 2002 eine Richtlinie zur Vermeidung von Weltraummüll. Diese Richtlinie sieht vor, dass die Betreiber von Objekten im niedrigen Erdorbit dafür Sorge tragen müssen, diese innerhalb von 25 Jahren nach Ende ihrer Lebenszeit so weit abzubremsen, dass sie in die Erdatmosphäre wieder eintreten und verglühen. Durch diese Regelung soll Weltraummüll im niedrigen Erdorbit reduziert und die Gefahr von Kollisionen zwischen Objekten in dieser Region reduziert werden. Dieser nachhaltige Ansatz soll mit der Flying Laptop Mission verfolgt werden. Dazu ist an Bord des Satelliten ein Deobritmechanismus installiert, der am Missionsende vom Boden oder automatisch aktiviert wird. Dieser entfaltet eine 2,5 x 2,5 m² große ebene Folie, welche den Strömungsquerschitt des Satelliten deutlich vergrößert. Dadurch tritt der Satellit in stärkere Wechselwirkung mit der im Orbit existierenden Restatmosphäre, wird so stärker abgebremst und verliert schneller an Höhe. Die Folienfläche wurde so ausgelegt, dass der Flying Laptop innerhalb von 25 Jahren wieder in die Erdatmosphäre eintritt und dort verglüht. Der Deorbitmechanismus ist ein Kaufteil und wurde in Kooperation zwischen der Tohoku Universität, Japan und der Firma Nakaschimada Engineering Works Ltd. entwickelt und gebaut.
Thermalkontrolle
Da es in einem Orbit um die Erde keine signifikante Atmosphäre gibt, fehlt der natürliche Wärmeaustauschmechanismus durch Konvektion des Satelliten mit seiner Umgebung. Temperaturen zwischen -100°C und +150°C sind dadurch möglich. Die Elektronik in einem Satelliten ist meist nur für Temperaturen zwischen -20°C und 80°C qualifiziert. Außerhalb dieses Bereichs kann es dazu kommen, dass z.B. die elektrischen Verbindungen auf Platinen aufbrechen oder schmelzen. Die Aufgabe des Thermalkontrollsystems ist es, die Temperatur des Satelliten mit seinen Komponenten in einem zulässigen Bereich zu halten. Das Kontrollsystem des Flying Laptop besteht aus mehreren Teilen wie etwa Temperatursensoren und Elementen und zur Beeinflussung der Temperatur. Die Temperaturen im Satelliten werden mit Hilfe von Pt1000 Platin-Temperatursensoren gemessen. Diese Sensoren vergrößern bei steigender Temperatur ihren elektrischen Widerstand, der direkt gemessen werden kann. Pt-Elemente weisen eine bessere mittlere Genauigkeit über den gesamten möglichen Temperaturbereich im Satelliten auf als andere Temperatursensoren und kommen ohne Messverstärker aus.
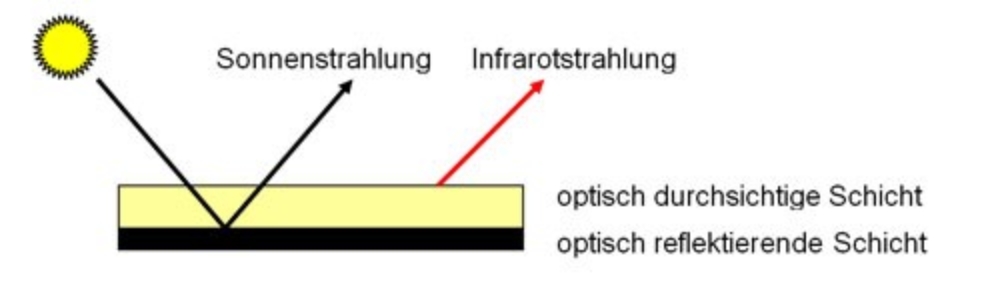
Um die Temperatur passiv zu beeinflussen, wird der Hauptkörper des Satelliten weitestgehend mit MLI („Multi Layer Insulation") umhüllt, um den Strahlungsaustausch mit der Umgebung an diesen Stellen zu minimieren. MLI besteht dabei aus mehreren gestapelten Lagen von Folien aus z.B. Polyimiden, die durch ein feines Kunststoffnetz voneinander getrennt sind. Auf diese Weise verringert jede Folienschicht somit die Aufnahme und Abgabe von Strahlung des Satelliten. An den nicht mit MLI bedeckten Stellen werden SSMs („Second Surface Mirrors") als Radiatoren angebracht, welche das Sonnenlicht gut reflektieren und dabei gleichzeitig die Wärme des Satelliten als Infrarotstrahlung abgeben.
Die Batterien und die Sternkameras sind mit einem eigenen Radiator ausgestattet und vom Rest des Satelliten weitestgehend isoliert, um den sehr engen Temperaturbereich dieser Komponenten zu garantieren. Für den Fall, dass die Temperaturen zu niedrig sein sollten, sind im Satelliten elektrische Heizfolien verteilt, die bei Bedarf eingeschaltet werden können. Diese Heizer werden primär vom Hauptcomputer des Satelliten geschaltet. Falls der Hauptcomputer ausfallen sollte, werden die Heizfolien über Thermostate (Bimetall-Schalter) kontrolliert.

Sabine Klinkner
Prof. Dr.-Ing.Stellvertretende Geschäftsführende Direktorin, Professorin für Satellitentechnik