
Für den Betrieb und die Entwicklung der Kleinsatelliten steht der Kleinsatellitengruppe eine Vielzahl von Werkzeugen zur Verfügung.
Neben der Entwicklung des Kleinsatelliten "Flying Laptop" befasste sich die zuständige Arbeitsgruppe auch mit der Einrichtung einer Bodenstation und eines Reinraums für Integration. Ein Optiklabor für die Kalibration von Nutzlasten wurde eingerichtet, eine Thermal-Vakuum-Kammer für die Qualifikation der Komponenten und ein Satellitensimulator für die Software-Verifikation und Betriebssimulation.
Diese so entstandenen Infrastrukturen, die für Entwicklung, Qualifikation, Bau und Betrieb von Kleinsatelliten notwendig sind, ebnen so auch den Weg für zukünftige Satellitenprojekte an der Universität Stuttgart.
{kind=link}
Bodenstation
Für die Kommunikation mit den institutseigenen Satelliten betreibt das IRS eine eigene Bodenstation. Das Ziel beim Aufbau der Anlage ist es, den Betrieb soweit wie möglich zu automatisieren. Damit soll die Nutzungszeit des Satelliten maximiert werden ohne einen teuren und aufwändigen 24h Betrieb aufbauen zu müssen. Die wichtigsten Aufgaben dieser Station sind das Senden von Kommandos an den Satelliten (Telecommanding, TC), der Empfang der Houskeeping-Daten (Telemetrie, TM), sowie der Download der wissenschaftlichen Nutzlastdaten des Satelliten (Payload Downlink, DDS).
Funkhardware
Die Antennenanlage ist in der Lage, auf dem in der Satellitenkommunikation weit verbreitetem kommerziellen S-Band (2.0 - 2.1 GHz) mit einer äquivalenten Ausgangsleistung von bis zu 10kW (EIRP: 40 dBW) zu senden und gleichzeitig, ebenfalls im kommerziellen S-Band (2.2 – 2.3 GHz), Telemetrie zu empfangen. Beides geschieht in rechter Hand orientierter zirkularer Polarisation RHCP.
Simultan dazu kann die Antennenanlage die Payloaddaten in linker Hand zirkularer Polarisation LHCP mit bis zu 10 Mbit/s im Amateurfunk- S-Band empfangen (2.4 GHz).
Zum Einsatz kommt dabei eine Parabolantenne mit einem Reflektordurchmesser von 2.5 m (33 dBi Gewinn), welche auf einem früheren Radar-Rotor montiert ist. Um den Anforderungen der Bahnverfolgung gerecht zu werden, wurde der Rotor von Institutsmitarbeitern mit neuen Schrittmotoren, Positionssensoren und neuer Steuerelektronik ausgestattet. Insgesamt erreicht die Antenne damit eine kalibrierte Ausrichtungsgenauigkeit von 0.3° bei einer maximalen Rotationsgeschwindigkeit von 12°/s.
Der Standort der Antennenanlage ist das Dach von Pfaffenwaldring 31, Koordinaten 48°44'58,19" N 9°06'13,84" E ca. 500m über N.N., QTH Locator JN48NR. Der Standort bietet aufgrund seiner exponierten Lage recht gute Empfangsbedingungen.
Zum Personenschutz wurde ein opto-akustisches Warnsystem installiert, welches einerseits vor den Bewegungen des Spiegels als auch vor den hohen elektrischen Feldern bei aktiver Endstufe warnt. Zur zusätzlichen Überwachung der Rotorbewegungen ist auf dem Dach eine Webcam installiert. Insgesamt sind dadurch die nötigen Sicherheitsvorkehrungen für einen Fernbetrieb gegeben, welcher aus dem Kontrollraum im RZBW (Pfaffenwaldring 29) gesteuert wird.
Die hochwertigen Vorverstärker, Filter und Hochleistungsendstufen wurden von SSB sowie Kuhne Electronic bezogen. Empfang und Senden finden auf einer Zwischenfrequenz von 70 MHz statt, weshalb Up- und Downconverter auf die Trägerfrequenzen zum Einsatz kommen. Der Transceiver ist dabei ein kommerzieller Satellitentransceiver von SSBV. Zum Empfang der Nutzlastdaten (DDS) kommt einerseits eine auf FPGA-Boards basierende Eigenentwicklung zum Tragen, andererseits wird gerade eine auf einem modernen Software-defined-Radio (SDR)-Transceiver basierende Lösung entwickelt.
Als zentrale Steuerungssoftware für den Funkbetrieb wird das selbstentwickelte Programm „METEOR“ genutzt. Dieses besitzt ein eigenes Modul zur Bahnvorhersage und steuert sowohl sämtliche Peripherie- und Messgeräte fern und regelt andererseits auch die Antennenausrichtung. Dabei besteht es aus einem Serverteil (CORE), der auf einem Steuerungscomputer im Shackraum (Dachaufbau neben der Antenne) ausgeführt wird, und einer graphischen Benutzeroberfläche, die sich per TCP/IP-Protokoll mit diesem über Glasfaserleitungen verbindet und im Kontrollzentrum ausgeführt wird.
Flugsoftware-Labor
Die Entwicklung der Flugsoftware (FSW) hat einen großen Anteil an der Entwicklung eines Raumfahrzeugs. Entsprechend gibt es am Institut für Raumfahrtsysteme ein eigenes FSW-Labor. Dort werden moderne Konzepte zur Entwicklung der Flugsoftware entworfen und getestet. Aktuell wird dort das C++ und komponentenbasierte "Flight Software Framework" (FSFW) und die darauf aufbauende Steuerungssoftware von Flying Laptop implementiert und getestet. Des Weiteren werden im Labor auch On-Board Computer und Avionikarchitekturen geplant und spezifiziert. Das Labor verfügt neben zahlreichen Entwicklungscomputern über eigene Entwicklungsplatinen, um die entwickelte Software mit wenig Aufwand testen zu können. Für komplexere Tests ist die unmittelbare Nähe zum Simulationslabor von Vorteil.

Reinraum
Im Rahmen des Kleinsatellitenprogramms wurde am Institut für Raumfahrtsysteme der Universität Stuttgart ein Satelliten Integrationsraum aufgebaut. Entgegen seinem Namen dient dieser allerdings nicht nur der Integration des Satelliten, sondern beherbergt eine Vielzahl unterschiedlicher Aktivitäten, z.B. dem Testen und der Herstellung von Elektronik und dem Testen sowie Kalibrieren von Kameras. Mit diesem Hintergrund industrielle Reinheit und Sauberkeit zu erreichen wurde dieser Raum, sowie dessen Ausstattung, gebaut und ausgestattet.
Charakteristiken:
- Minimale Luftreinheit der Klasse ISO 8 (100.000er nach altem US Standard)
- Flow Boxen für lokale Luftreinheit der Klasse ISO 5 (100er nach altem US Standard)
- Luftparameter werden konstant überwacht
GSE:
- Röhnrad zur Satellitenintegration
- Kran
- Gedämpfte Tische für Arbeiten an Optiken
- Diverse optische Ausstattung wir Spektrometer, QHT Lampe, Ulbrichtkugel uvm.
- Lötarbeitsplatz für Arbeiten an Platinen
- ESD Sicherheitsausstattung
Layout:
Der Integrationsraum befindet sich im neu errichteten RZBW. Er kann nur durch eine Schleuse betreten werden. Hinter der Schleuse ist der, in drei Gebiete eingeteilte, Integrationsraum. Diese bestehen aus:
- Integrationsbereich für die Integration des Satelliten
- Funktionaler Verifikationsbereich für Komponenten und Flatsat Tests
- Optisches Labor für Entwicklung und Kalibration von optischen Instrumenten
Zusammen sind diese drei Bereich über 119qm groß.

Optiklabor
Ein mit schwarzen Vorhängen abgetrennter Bereich des Integrationsraumes dient der Charakterisierung und Kalibrierung der Kamerasysteme. Auch die Wände, Deckenplatten und Möbel in diesem Bereich sind zur Unterdrückung von Reflexionen schwarz gestrichen. Die Messvorrichtungen im Raum ermöglichen es die optischen Eigenschaften der Kameras von Flying Laptop zu bestimmen um sie zu kalibrieren. Die Kalibrierung von Kameras lässt sich in drei Bereiche unterteilen:
- Radiometrische Kalibrierung
- Spektrale Kalibrierung
- Geometrische Kalibrierung
Bei der radiometrischen Kalibrierung soll die Empfindlichkeit jedes Pixels des Sensors bestimmt werden. Damit ist es möglich die Signalwerte des CCDs in strahlungsphysikalische Größen umzurechnen. Im Labor wird dazu als Lichtquelle mit bekannter Strahldichte und spektraler Verteilung eine Ulbrichtkugel mit 500 mm Durchmesser verwendet. Ziel der spektralen Kalibrierung ist die Untersuchung des Sensorverhaltens gegenüber Licht mit bestimmter Wellenlänge, da sowohl der CCD-Sensor, als auch die Optiken wellenlängenabhängige Eigenschaften besitzen. Dazu besteht der Messplatz im Labor aus einer Quartz-Wolfram-Halogenlampe als Lichtquelle, einem Monochromator zum Herausfiltern eines schmalen Wellenlängenbereiches aus dem breitbandigem Spektrum der Lichtquellen, sowie einem Linsensystem zur Verringerung und Aufweitung der Lichtstrahlen.
Satellitenbetriebssystem
Um den eigenen Satelliten im Orbit steuern zu können, ist oben beschriebene Funkhardware leider nicht ausreichend. Am Boden wird zusätzlich ein Betriebssystem benötigt, das die Kommandos an den Satelliten enthält, überprüft und kodiert, sowie die Telemetrie des Satelliten dekodiert und interpretiert. Dabei geht das IRS einen neuen Weg verglichen zu anderen Universitäten. Zur Kontrolle der Satelliten wird das von der ESA entwickelte Satellitenbetriebssystem SCOS-2000 eingesetzt. In Kombination mit dem CCSDS-Funkprotokoll und dem ESA Packet Utilisation Standard (PUS) folgen die IRS Missionen den in der europäischen Satellitenindustrie üblichen Standards. Die hier ausgebildeten Studenten bekommen so einen einzigartigen Einblick in die später in ihrem Berufsleben auftretenden Programme, Strukturen aber auch Probleme. Ein nicht zu unterschätzender Wettberwerbsvorteil gegenüber anderen Hochschulen.
Zur Automatisierung der Satellitensteuerung wird das von Rhea System entwickelte MOIS eingesetzt. Diese Software ermöglicht es, vorgefertigte Prozeduren zur Steuerung von SCOS-2000 automatisch ablaufen zu lassen.
Um frühzeitig den Betrieb der Satelliten zu üben und um die Hard- und Software in der Bodenstation funktional zu testen, wird der in der Systemsimulation verwendete, von EADS-Astrium entwickelte Simulator auch in der Bodenstation verwendet. Damit können die Prozeduren des Betriebs schon vor dem Start des Satelliten verifiziert und mithilfe eines Relaissatelliten auch die Funkstrecke getestet werden.
Als weiteres Tool zur Verbesserung des Satellitenbetriebs wurde am Institut eine 3D-Visualisierung des Satelliten im Orbit entwickelt. Diese basiert auf der Open-Sorce Software Celestia, in das ein 3D-Modell des Satelliten geladen wurde. Im Betrieb können live aktuell empfangene Telemetriedaten z.B. über die Lage geladen werden. Damit erhält man sofort einen Eindruck über die aktuelle Lage des Satelliten. Als weiters Feature ist geplant, das aktuelle Sichtfeld der Kameras einblenden zu können. Auch die nachträgliche Verarbeitung der Telemetriedaten ist möglich.
Systemsimulation und Verifikation
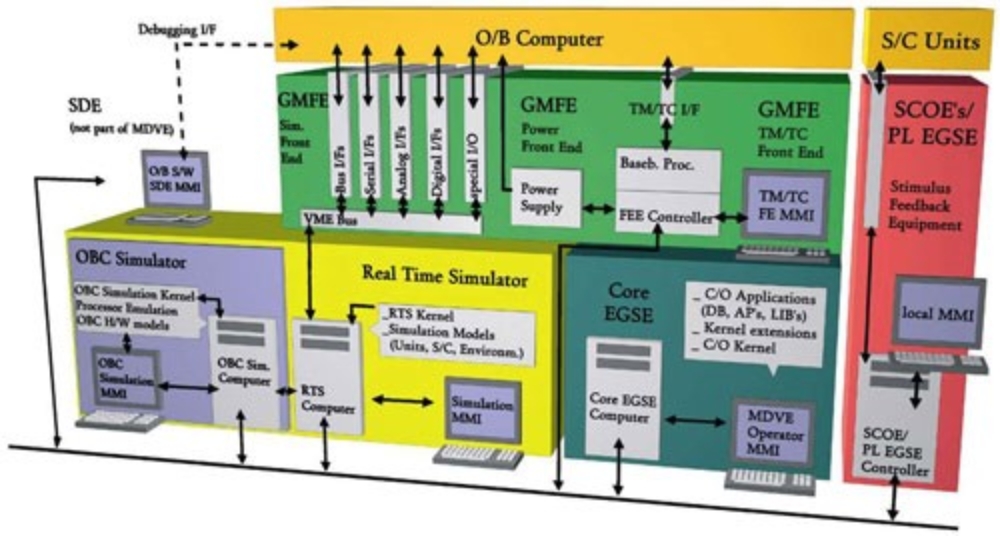
Dem Institut für Raumfahrtsysteme steht eine Satellitensimulationsumgebung mit einer vollständigen Kommandierungskette zur Verfügung. Diese besteht aus diversen Entwicklungsboards zum Testen der Onboard Software, einem Echtzeitsimulator zur Simulation von Raumfahrzeugen, einem Missionskontrollsystem und einem System zur automatischen Ausführung von Flug- und Testprozeduren. Desweiteren wurde eine 3D Visualisierungsanlage implementiert. Als erstes Projekt des Stuttgarter Kleinsatellitenprogramms wird der Flying Laptop in dieser Umgebung simuliert um Kontrollalgorithmen und die Bordrechnersoftware bereits testen zu können, bevor die entsprechende Hardware verfügbar ist. Auch Hardware-in-the-Loop Tests können mithilfe dieser Umgebung durchgeführt werden. Die Komponenten dieser Kommandierungskette erfüllen Industriestandards, wovon Studenten, die über studentische Arbeiten mit diesen Komponenten umgehen, profitieren. Den Studenten stehen also echte Industriewerkzeuge zur Verfügung. Die gezeigte Abbildung stellt die Architektur einer solchen Infrastruktur dar.
Der Echtzeitsimulator stellt das Herz dieser Simulationsumgebung dar und wurde von Airbus DS bereitgestellt. Die Bordrechnersoftware läuft entweder auf einem der FPGA Entwicklungsboards oder einem Entwicklungsmodell des Bordrechners. Sowohl der Simulator als auch die Bordrechnersoftware auf dem Entwicklungsboard können über das ESA Missionskontrollsystem SCOS-2000 gesteuert werden, welches später für die Bodenstation des Instituts verwendet wird. Satellitentest- und Flugprodzeduren können mit Hilfe der Computersoftware MOIS bearbeitet und automatisch ausgeführt werden. Dieses System wurde von Rhea zur Verfügung gestellt und ermöglicht die automatisierte Ausführung von Tests. Letztendlich wird der Satellit als 3D Objekt mit der quelloffenen Software Celestia in seinem momentanen Flugzustand angezeigt. Tests zeigten, dass die Satellitensimulationsumgebung, verglichen mit anderen Simulationen (z.B. mithilfe von Matlab), sehr genau arbeitet. Studien- und Diplomarbeiten sind in verschiedenen Betätigungsfeldern vorhanden.
Systemsimulation Software
- Aonix Ameos
-
Alle in der Systemsimulation verwendeten Komponentenmodelle, z.B. für Sensoren und Aktuatoren, werden mit der Programmiersprache C++ abgebildet. Da sämtliche Modelle die gleiche Grundstruktur haben, wird ein Codegenerator benutzt, der den Rohcode erzeugt. Um mit dem Codegenerator auch bereits die benötigten Variablen und Methoden zu erstellen, werden diese in UML-Klassendiagrammen definiert und daraus miterzeugt. Die UML-Klassendiagramme können mit der von Aonix bereitgestellten Software Ameos erstellt und bearbeitet werden.
- Eclipse Galileo
-
Die nun erzeugten C++ Quelldateien werden mit der Software Eclipse Galileo bearbeitet und mit der funktionalen Algorithmik gefüllt, die das Verhalten der jeweiligen Komponente wiedergibt. Eclipse bietet neben der komfortablen Verknüpfung von Entwicklung, Kompilierung, Fehlersuche und Darstellung des Quelltextes auf einer grafischen Benutzeroberfläche eine hervorragende Handhabung zur Versionsverwaltung mit CVS und SVN, was in der Entwicklung ausgiebig genutzt wird.
- SCOS-2000
-
Sowohl zur Kommandierung des Simulators und der damit verbundenen Onboard Software wie auch zur komfortablen und direkten Anzeige von Telemetrie während eines Simulationslaufes wird das Missionskontrollsystem SCOS-2000 genutzt. Diese von der ESA entwickelte Software wird auch später zur Kommandierung des realen Satelliten im All genutzt. SCOS-2000 kann mit einem eigens dafür entwickelten Proxy sowohl mit dem Simulator wie auch der daran angekoppelten Onboard-Software verbunden werden.
http://www.egos.esa.int/portal/egos-web/products/MCS/SCOS2000/
- MOIS
-
Zur automatischen Ansteuerung des Missionskontrollsystems wird die von Rhea entwickelte Software MOIS (Manufacturing and Operations Information System) genutzt. Diese ermöglicht die Erstellung von Prozedurlogik und deren Füllung mit aus SCOS-2000 importierten Telekommados und Telemetrie. Die Testprozeduren können schließlich auch ausgeführt werden. Da MOIS in der Lage ist, auf Telemetrie zu reagieren, kann der Operator während Simulationen durch das Programm ersetzt werden.
- Celestia
-
Um Position, Lage und Bewegung des simulierten Satelliten nicht nur anhand der Diagramme in SCOS-2000 interpretieren zu können, wird das Programm Celestia genutzt. Durch Konvertierung des entsprechenden CATIA-Modells und Import nach Celestia kann der Satellit in seiner simulierten Lage und Position dreidimensional dargestellt werden. Dies wird durch Übergabe der jeweiligen Parameter des Simulators an Celestia verwirklicht. Das Programm ermöglicht so eine 3D live Visualisierung.

Thermal-Vakuum-Kammer
Das Institut für Raumfahrtsysteme besitzt einen Vakuumtank, der exklusiv für Thermal-Vakuum-Tests von Satellitenkomponenten genutzt wird. Mit Hilfe des Tanks können durch die fehlende Konvektion ähnliche Umgebungsbedingungen für Satellitensysteme simuliert werden, wie sie in einem Satelliten in einer Erdumlaufbahn herrschen. Der Unterdruck im Tank wird dabei über zwei verschiedene Pumpen erzeugt. Zuerst wird über eine Schieberpumpe ein Vorvakuum erzeugt, welches die Turbopumpe benötigt. Bei einem Test wird die Satellitenkomponente verschiedenen Temperaturen ausgesetzt und dabei deren Funktion überprüft. Dies ist notwendig, da die Temperatur eines Satelliten um über 100 Kelvin schwanken kann. Die Temperatur der Komponente kann dabei mit Hilfe eines Umwälzthermostaten eingestellt werden, der Silikonöl durch eine Kupferplatte pumpt und diese dadurch kühlt oder heizt. Über Temperatursensoren an verschiedenen Punkten der Komponente können die Messungen mit mathematischen Vorhersagen verglichen werden.
Die technischen Daten der Thermal-Vakuum-Kammer in Überblick:
|
Durchmesser |
1 m |
|
Länge |
2 m |
|
Temperaturbereich |
-40°C bis 115°C |
|
Kühlplatte |
400 x 500 mm² (effektiv 350 x 400 mm²) |


Sabine Klinkner
Prof. Dr.-Ing.Stellvertretende Geschäftsführende Direktorin, Professorin für Satellitentechnik