
Nutzlastcomputer (PLOC)
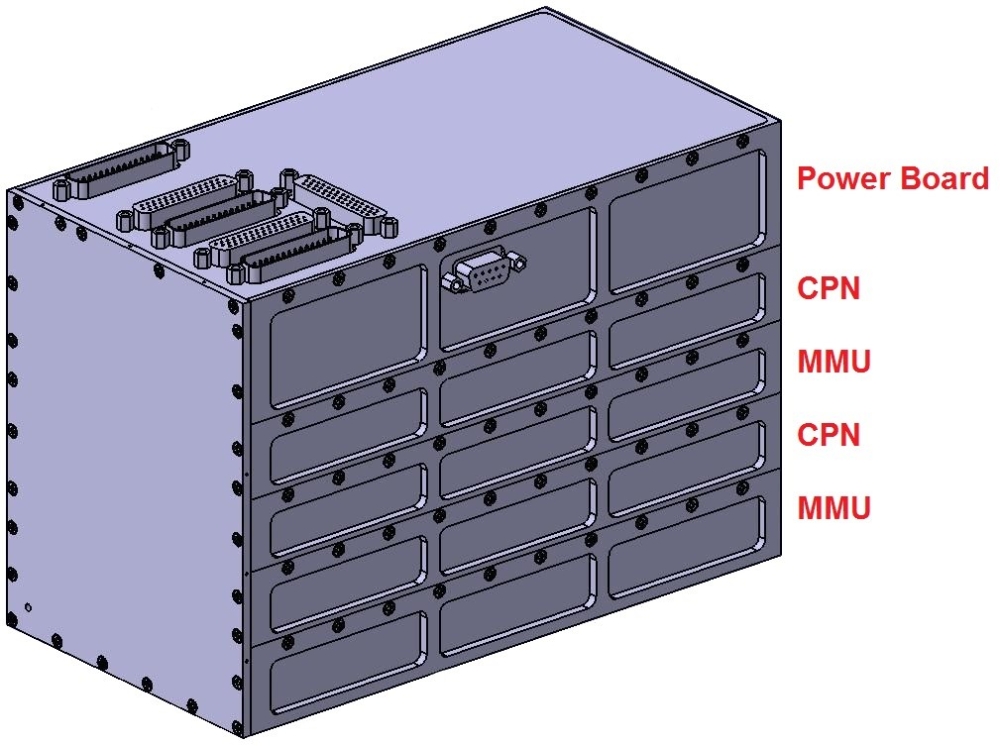
Für die Ansteuerung der Nutzlasten sowie für die Verwaltung der Nutzlastdaten verwendet der Flying Laptop einen dedizierten Nutzlastcomputer, den PayLoad On-board Computer – PLOC.
Das Herzstück dieses Computers ist ein Virtex-II-Pro FPGA von Xilinx. Dieser befindet sich auf einer eigens, vom Frauenhofer Institut für Rechnerarchitektur und Softwaretechnik, entwickelten Platine, der Central Processing Node (CPN). Die Verwendung des FPGAs führt zu einer hohen Parallelisierung, welche bei einer zeitgleichen Ansteuerung verschiedener Nutzlasten, sowie der Verarbeitung zeitgleich eintreffenden Nutzlastdaten, notwendig ist.
Der CPN besitzt zur eigenen Verwaltung einen weiteren kleineren FPGA, den Spartan 2. Dieser ist für die Platine an sich zuständig und liefert damit nicht nur grundliegende Daten der Platine sondern ist ebenfalls für die Konfiguration des Virtex-II-Pro verantwortlich. Für diese Aufgabe benutzt er 3 Flash Chips um Konfigurationen des Haupt FPGAs zu speichern. Die Verwendung des zweiten FPGAs ermöglicht es den Virtex-II-Pro auch nach dem Launch mit einer neuen Konfiguration zu versehen.
Zusätzlich zu den FPGAs verfügt der CPN auch über Elemente zur Zwischenspeicherung von Nutzlastdaten. Hierfür stehen 3 DDR SDRAM Bausteine mit jeweils 128MB zur Verfügung sowie 4 SSRAM Chips mit jeweils 4,5MB.
Neben diesen Hauptmerkmalen verfügt der CPN noch über weitere Elemente wie u.a. einem Comperator zur Stomüberwachung, EEPROM und einem NAND Flash.
Der Zuständigkeitsbereich des CPN umfasst nicht nur die Nutzlasten sondern auch eine dedizierte Mass Memory Unit – MMU zur Speicherung von Nutzlastdaten. Über diese MMU hat er zugriff auf 2GB Flash Speicher. Die MMU wurde komplett am Institut entwickelt, gebaut, getestet und programmiert. Auch ihr Kern besteht aus einem FPGA, wobei die MMU einen ProASIC3L FPGA der Firma Actel verwendet.
Die Kombination aus CPN und MMU ergibt hierbei immer eine abgeschlossene Einheit zur Nutzlastansteuerung. Im PLOC sind aus Redundanzgründen zwei dieser Einheiten verbaut.
Abgeschlossen wird die Elektronik des PLOCs mit einem eigens entwickelten Power Board. Ebenso wie die MMU wurde dieses im Haus entwickelt, gebaut und getestet. Nicht nur soll dieses die Busspannung auf ein niedrigeres Niveau transformieren, sondern auch den Einschaltvorgang steuern und in Problemfällen einen Notabschaltung durchführen.
Multispektrales Kamerasystem (MICS)
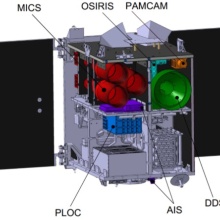
Das MICS (Multi-spectral Imaging Camera System) ist die Hauptnutzlast zur Bilderfassung des Flying Laptop. Es wurde für zwei Anwendungen ausgelegt. Die Hauptaufgabe ist die Beobachtung von ausgewählten Zielen auf der Erdoberfläche aus verschiedenen Winkeln. Diese Beobachtungen können später für die Berechnung der Bidirektionalen Reflektanzverteilungsfunktion (engl.Abk. BRDF) verwendet werden. Die zweite Aufgabe des Kamerasystems ist die Erdbeobachtung im 'nadir pointing mode' und im 'target pointing mode' des Satelliten. Dies kann unter anderem zur In-Orbit-Verifikation des AIS Empfänger-Systems an Bord des Satelliten genutzt werden. Da die erste Aufgabe höhere Anforderdungen stellt, wurde das MICS speziell für die winkelabhängige Erdbeobachtung ausgelegt.
MICS ist als Matrixscanner mit den spektralen Kanälen Rot, Grün und nahes Infrarot ausgelegt. Die Hauptanforderung an das Kamerasystem für die Erdbeobachtung ist ein gutes Signal zu Rausch Verhältnis, während eine hohe Bodenauflösung nicht entscheidend ist. Das Instrument besitzt eine Bodenauflösung (ground sample distance) von 21,5 m bei einer Orbithöhe von 600 km und damit eine Schwadbreite von etwa 22 km. Es besteht aus drei getrennten Kameras, die in einer Dreiecksanordnung auf der optischen Bank angebracht sind (siehe Bild unten). Die Kameras sind bis auf den vorgelagerten Spektralfilter identisch aufgebaut. Das MICS wurde um den Kodak CCD Interline-Sensor KAI-1003M herum entwickelt.
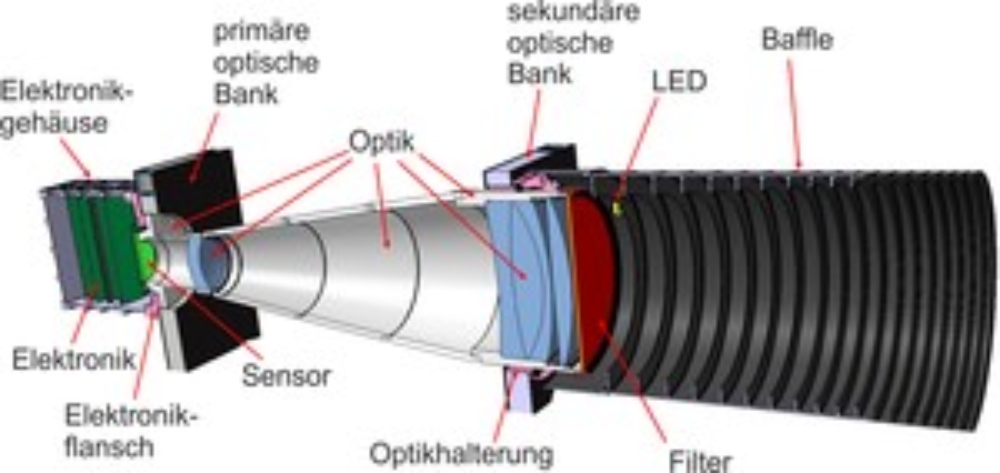
Jede Kamera besteht aus neun Komponenten (siehe Bild unten): Elektronikgehäuse, Ausleseelektronik, CCD Sensor mit Sensor Board, Elektronikflansch, Optik, Optikhalterung, Filter, Baffle und Kalibrationssystem. Das Gehäuse der Optik ist aus Titan gefertigt, um temperaturbedingte Verformungen zu minimieren. Für die Filter und Linsen wurde strahlungsunempfindliches Material verwendet. Die Kamerasteuerung, die Datenverarbeitung und die Datenspeicherung werden vom Payload On-Board Computer (PLOC) übernommen.
Um durch thermale Einflüsse bedingten Ausrichtungsfehler zu minimieren, sind die Kameras auf der optischen Bank des Satelliten befestigt (siehe Bild oben). Diese besteht aus einer Aluminium-Sandwich Struktur mit Deckschichten aus kohlenstofffaserverstärktem Kunststoff. Um eine hochpräzise Ausrichtungsinformationen zu erhalten, sind die Sternenkameras ebenfalls auf der optischen Bank montiert.
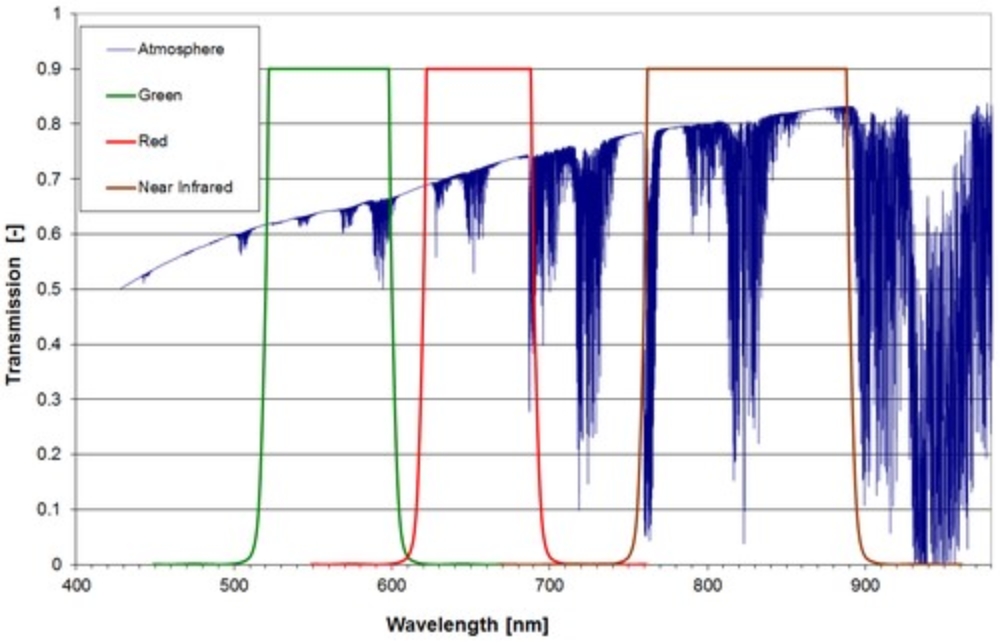
Die Filter sind speziell für Erdbeobachtungszwecke ausgelegt. Daher ist die Definition der Kanäle stark durch die atmosphärische Absorbtion geprägt. Das Bild unten zeigt die gewählten Filterkanäle und die Absorbtion der Atmosphäre. Bei einem möglichst hohen Transmissionsgrad innerhalb der Kanäle müssen die Filter den restlichen Spektralbereich von 200 nm - 1000 nm blocken.
Um die Kameras im Labor zu charakterisieren und kalibrieren, wurde im Satellitenintegrationsraum ein Optikmessplatz in einem abgedunkelten Bereich eingerichtet. Darin ist es möglich, die Kameras radiometrisch und spektral zu kalibrieren. Details dazu gibt es hier. Jede der Kameras ist mit einem neuentwickelten LED Kalibrierungssystem ausgestattet, das es erlaubt, Veränderungen der Sensorempfindlichkeit bzw. Degradationserscheinungen der Optik im Orbit zu untersuchen.

Panoramakamera (PAMCAM)
Das kleine Sichtfeld des wissenschaftlichen Kamerasystems MICS macht den Einsatz eines weiteren Kamerasystems sinnvoll, welches einen Überblick über die beobachteten Landschaften bietet. Daher wurde die sogenannte Panorama Kamera (engl. PAMCAM) entwickelt, welche Farbfotos unter anderem zur Verwendung bei der Öffentlichkeitsarbeit aufnimmt. Sie wird parallel zum MICS mit reduzierter Aufnahmefrequenz betrieben.
PAMCAM basiert auf der COTS-Kamera BCi5-LS-B-40, die von C-Cam Technologies, einer Division von Vector International, gefertigt wird. Die Standardelektronik wurde modifiziert und um zwei am IRS entwickelte Platinen erweitert. Der Leistungsbedarf der Kamera liegt unter 2 W. Sie ist mit dem IBIS5A-1300 CMOS-Sensor von FillFactory ausgestattet. Dieser besitzt 1280 x 1024 Pixel mit einem Pixelabstand von 6,7 µm ausgestattet mit einem Bayer-Pattern. Die Pixel werden mit 10 bit digitalisiert und die Bilder im RAW Format übertragen. Die verbaute Linse MEVIS-CF von Qioptiq wurde modifiziert um hohe mechanische Lasten zu überstehen. Bei einer Brennweite von 25mm hat die diese eine Blendenzahl von 1,6. Das Sichtfeld der PAMCAM umfasst 20° x 16°, was in einer Schwadbreite von 200 km und einer Bodenauflösung von 160 m aus einem 600 km Orbit entspricht. Das Signal-Rausch-Verhältnis wurde konservativ auf über 100 für Bodenziele im Tageslicht bestimmt.
Die Kamerasteuerung und die Datenverarbeitung wird vom Payload On-Board Computer (PLOC) erledigt. Die Datenschnittstelle besteht aus 7 LVDS-Signalen, von denen 6 zur Bildübertragung und 1 für die Kamerakontrolle benutzt werden.
Die Kamera wurde in einem kombinierten Thermal-Vakuum-Zyklus Test nach ECSS Standard für einen Temperaturbereich von -10°C bis 40°C im Betrieb und von -20°C bis 65°C bei ausgeschalteter Kamera qualifiziert. Zudem hat die Kamera mechanische Tests mit 20 gRMS überstanden.

S-Band Datenlink (DDS)
Das DDS (Data Downlink System) ist ein System, das Nutzlastdaten zur Bodenstation überträgt. Das DDS sendet die Wissenschaftsdaten und Nutzlastbilder mit einer Datenrate von 10 Mbps zur IRS Bodenstation. Diese hohe Datenrate wird benötigt, um die generierte Datenmenge in der begrenzten Übertragungszeit von max. 10 min pro Pass zu schicken. Die Übertragung findet im Amateurfunk S-Band statt.
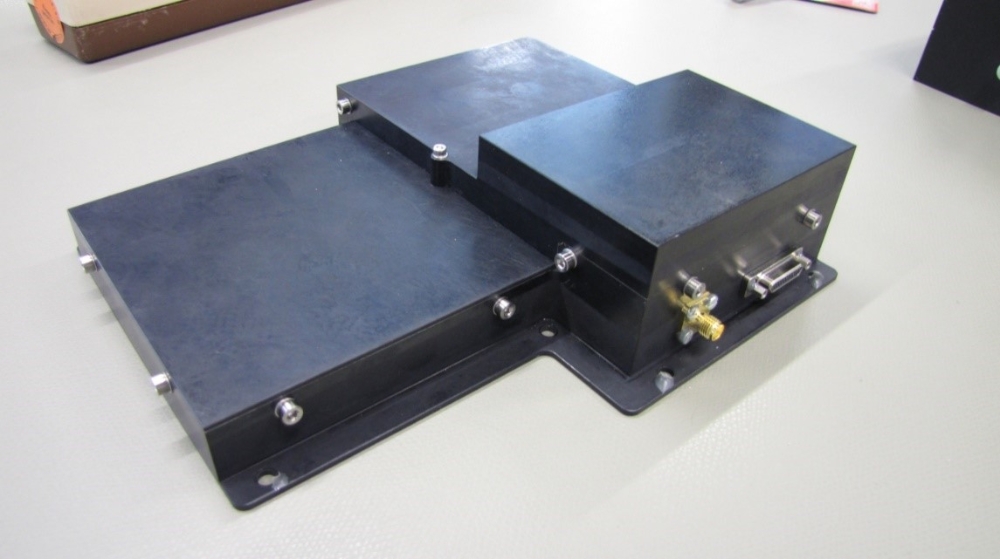
Um diese Funktion zu schaffen, werden drei Geräte benutzt:
- Zwei redundante Sender (Links) modulieren das Signal in ein SRRC (Square Root Raised Cosine Filtered) QPSK (Quadrature Phase Shift Keying) Waveform. Die Ausgangsleistung der Sender ist zirka 0,5 Watt und wurde mit COTS Komponenten am IRS entwickelt und qualifiziert.
- Falls ein der Sender ausfällt, wird ein raumfahrtqualifizierter Schalter (Bild Mitte) verwendet, um zwischen den beiden Sendern zu wechseln.
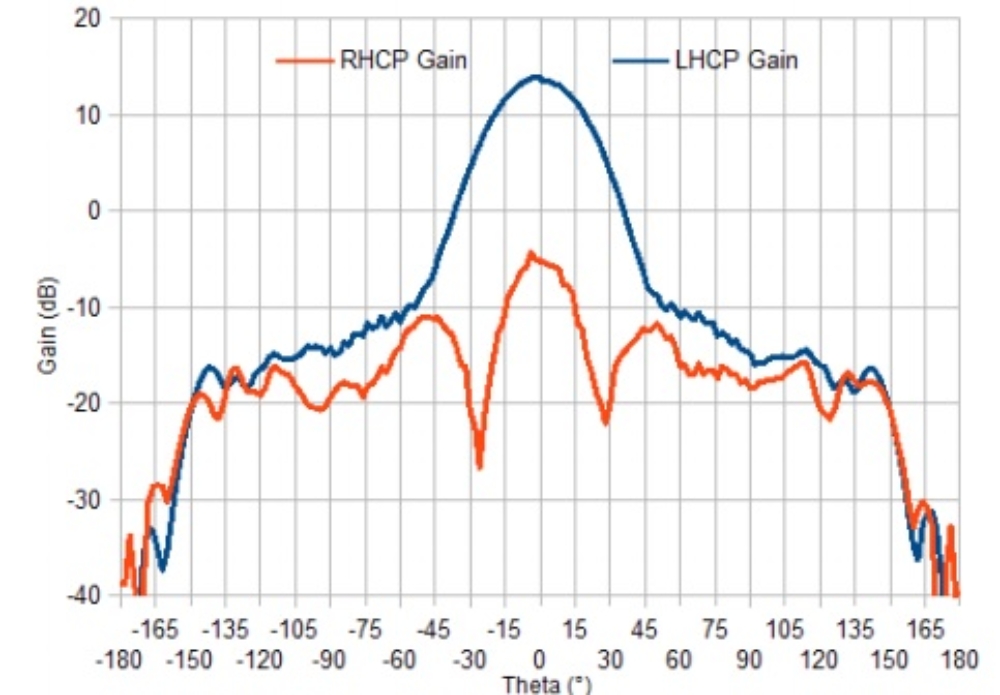
- Letztlich wird eine Hornantenne (Bild Rechts) benutzt, um das Signal in den Freiraum auszustrahlen. Diese Antenne hat einen Gewinn von zirka 13.5 dB und ist linkszirkular polarisiert, um den Einfluss der Orientierung vom Satelliten im Link Budget zu minimieren. Die Antenne verwendet Hohlleitertechnologie und wurde am IRS entwickelt.

Optischer Kommunikationslink (OSIRIS)
Das Optical HighSpeed Infrared Link System auf Flying Laptop (OSIRIS-FLP) ist ein vom Institut für Kommunikation und Navigation des DLR in Oberpfaffenhofen entwickelter Technologiedemonstrator. Ziel ist es, die Einsetzbarkeit eines kostengünstigen optischen Terminals mit geringer technischer Komplexität unter Beweis zu stellen und für zukünftige Kleinsatellitenmissionen verfügbar zu machen.
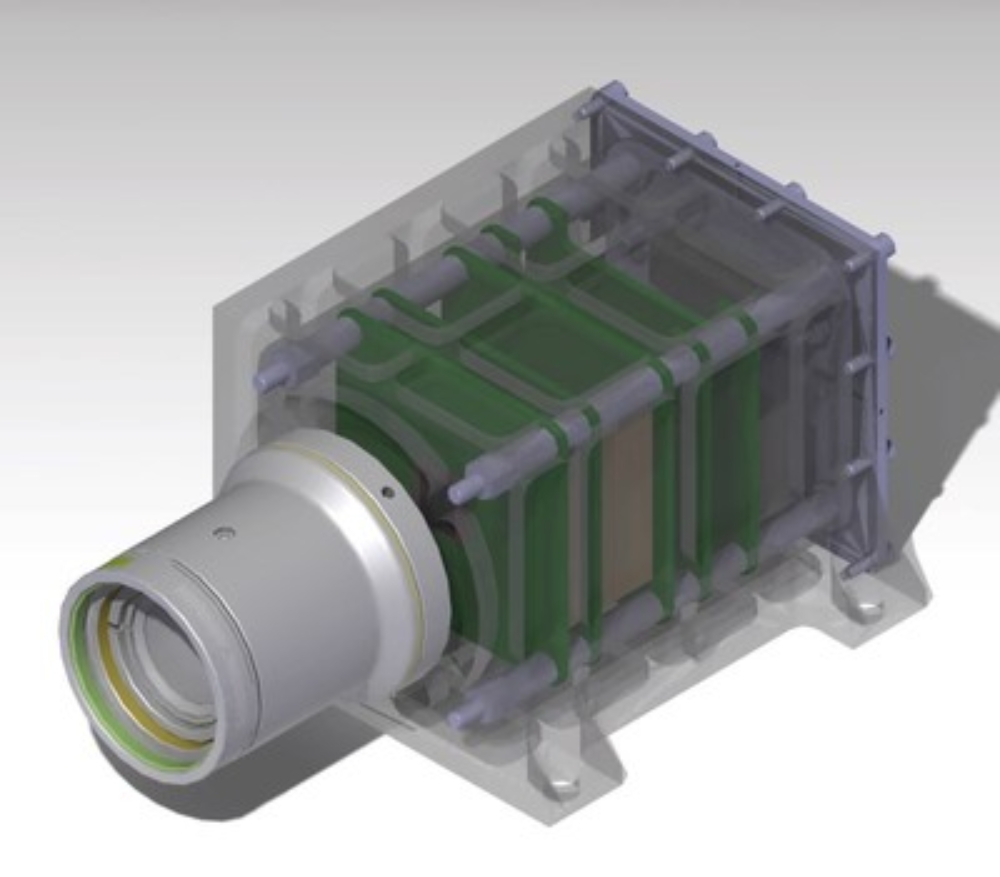
Das Instrument besteht aus zwei optischen Transmitter Einheiten, die in ein gemeinsames Gehäuse integriert sind. Jede Einheit ist mittels Glasfasern mit einem externen Kollimator verbunden. Diese werden auf der optischen Bank des Satelliten angebracht, um eine ideale Ausrichtung zu den Nutzlasten und der z-Achse des Satelliten zu gewährleisten. Die von den Transmittern benötigten Versorgungsspannungen werden in einer separaten Box generiert.
Die beiden Transmitter benutzen unterschiedliche Technologien. Einer basiert auf einer Hochleistungs-Laser-Diode (engl. HPLD) während der andere ein Laser Modul und einen Erbium dotierten Faserverstärker (engl. EDFA) vereint. Beide Übertragungseinheiten arbeiten bei einer Wellenlänge von 1550 nm und benutzen eine Amplitudenumtastung nach dem On-Off-Keying Prinzip zur Modulation. OSIRIS hat eine Maximale Leistungsaufnahme von 25 W und eine Masse von 1,5 kg. Die Maximale Übertragungsrate aus dem Orbit wird 80 Mbit/s betragen.
Das Signal wird durch die optische Bodenstation des Instituts für Kommunikation und Navigation in Oberpfaffenhofen (OGS-OP) und durch deren transportable optische Bodenstation (TOGS) empfangen.
Empfänger für Schiffssignale (AIS)
Der im 3. Quartal 2012 hinzugekommene AIS Empfänger samt eigener Antenne ist die neueste Nutzlast auf Flying Laptop. Diese Nutzlast wurde vom Institut für Raumfahrtsysteme des DLR in Bremen entwickelt, gebaut und getestet. Das System ist in der Lage, AIS Signale von Schiffen zu empfangen. Bevor allerdings weiter auf das System eingegangen wird, wollen wir kurz das AIS System als solches erläutern. Seit dem 1. Januar 2004 ist es die Pflicht sämtlicher Berufsschiffe über 300 BRT in internationalen Gewässern einen AIS Sender zu betreiben. Seit dem 1. Juli 2008 müssen auch sämtliche Schiffe über 500 BRT in nationalen Gewässern ein AIS Sender betreiben. Das Automatic Identification System (AIS) ist ein System, das den Marineverkehr überwacht. Gerade in Zeiten immer höheren Verkehrsdichten im marinen Raum ist solch ein System unabdingbar. Das AIS wird für die folgenden Punkte genutzt:
- Kollisionsverhütung
- Information für Küstenstaaten bzgl. Schiffen und deren Ladungen
- Hilfsmittel für landseitige Überwachung
Das System funktioniert wie folgt:
Schiffe setzten in regelmäßigen Abständen eine Nachricht ab. Diese Nachricht beinhaltet u.a. Position, Kurs und Geschwindigkeit des Schiffs, den Schiffsnamen und das Funkzeichen. Hat ein Schiff einen AIS Empfänger, kann es die Signale zur verbesserten Planung und Entscheidungsfindung nutzen. Diese von den Schiffen ausgesendeten Signale können auch vom Weltall aus empfangen werden. In einer last-minute Kooperation zwischen dem DLR und dem Institut für Raumfahrtsysteme der Uni Stuttgart gelang es, ein AIS Empfangsgerät inkl. Antenne im Satelliten unterzubringen. Nach dem Motto "Form follows function" ist somit auch die etwas außergewöhnliche Form des AIS Empfänger Gehäuses entstanden.
Andere Satelliten nehmen derzeit schon reichlich AIS Daten auf und verfolgen die Routen der Schiffe. Das Novum auf Flying Laptop wird die seltene Kombination zwischen AIS Empfänger und Kamerasystem auf einem Satelliten sein. Somit wird eine Möglichkeit geschaffen, zu überprüfen, wie stark das System eingesetzt wird und wie gut die ausgesendeten Signale mit der realen Position der Schiffe übereinstimmt.
GENIUS
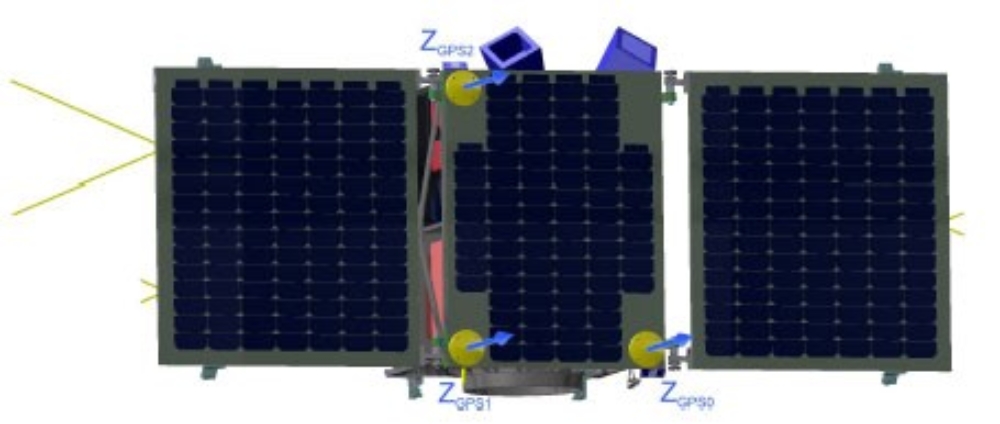
GENIUS, das "GPS Enhanced NavIgation system for the University of Stuttgart micro-satellite" wird in Zusammenarbeit mit dem Deutschen Raumfahrt-Kontrollzentrum in Oberpfaffenhofen entwickelt. Die Antennen der drei getrennten GPS Receiver werden in drei Ecken des zentralen Solarpanels in L-Form montiert. Das GPS System liefert dem Bordrechner in Echtzeit Position, Geschwindigkeit und Zeitinformationen mit einer Genauigkeit von 10m, 0,1 m/s und 1 µs. Die Neuheit bei GENIUS stellt der Quarzoszillator dar, der den Receivern eine stabile Referenzfrequenz liefert und sie absolut synchron hält. Weiterhin werden die Rohdaten und Trägermessungen gespeichert um sie bei Kontakt mit der Bodenstation für die weitere Auswertung zu übermitteln. Mit diesen Messungen kann die Genauigkeit auf 1 m gesteigert werden. Des Weiteren ist es möglich, die Lage des Satelliten mit Hilfe der GPS Trägerphasenmessungen mit einer Genauigkeit zwischen 0,1° und 1° zu bestimmen.

pLayload
Willkommen zu Mehrspieler-Online-Satelliten-Betrieb!
Du kannst hier daran mitwirken, den Speicher von @Flying_Laptop auf Mögliche Inkonsistenzen, verursacht durch Nuklearreaktionen mit Elektronen und Neutronen (MINEN), zu untersuchen.
Der Speicher von Flying Laptop ist in 64 Blöcke unterteilt. Mit Mathe und etwas Raten konnten wir feststellen, dass in jedem Block maximal eine MINE zu finden ist. Wissenschaftler in Großbritannien haben zudem herausgefunden, dass genau zehn MINEN im gesamten Speicher zu finden sind.
Da MINEN benachbarte Speicherblöcke beeinflussen, kann man feststellen, wie viele benachbarte Blöcke eine MINE enthalten, indem man einen Block ausließt. Mit dieser Information können wir herausfinden, wo sich MINEN befinden. Aber Vorsicht, man darf keinen Block auslesen, der eine MINE beinhaltet, da dann der Orbital Beschäftigte Computer (OBC) abstürzen könnte.
Welcher Block ausgelesen werden soll, wird durch eine Abstimmung festgelegt. Der Block mit den meisten Stimmen wird während des nächsten Überfluges von Flying Laptop überprüft. Überflüge, während denen wir Kommandos zum Satelliten schicken, sind immer vormittags unter der Woche. Die Abstimmung wird etwa um 10 Uhr UTC freigegeben und schließt um 23 Uhr UTC. Jeder Teilnehmende hat eine Stimme.
Solange zwischen keinem Feld und zwei Feldern ausgelesen sind, wird pro Tag nur ein Block ausgelesen. Danach erhöht sich die Anzahl der pro Tag ausgelesenen Blöcke langsam auf fünf, damit das Spiel etwas schneller läuft.
Bereit? Dann los zu Flying Latops Chief Easteregg Operator (CEO) Uli: http://flp.ulimohr.com/minesweeper/

Sabine Klinkner
Prof. Dr.-Ing.Stellvertretende Geschäftsführende Direktorin, Professorin für Satellitentechnik