Am 06.03.2020 fand am Institut für Raumfahrtsysteme zum dritten Mal in Folge das jährliche Abschlussevent der zweisemestrigen Lehrveranstaltung „Roverentwicklung für Explorationsaufgaben" statt. Im Rahmen einer praktischen Projektarbeit entwickeln Studierende dabei funktionale robotische Systeme für planetare Explorationsanwendungen, die jeweils zum Ende des Semesters bei einer Challenge demonstriert werden, bei der zwei Teams gegeneinander antreten. Die Projektarbeit umfasst interdisziplinäre Lehr- und Forschungsschwerpunkte (z.B. analytische Auslegung, mechanisches Design, elektronisches Layout, Power- und Datenmanagement, Programmierung von Mikrokontrollern und Aktuatoren sowie deren Steuerung und Kommandierung, Budget- und Projektmanagement, etc.) und erfordert ein hohes Maß an Teamarbeit.
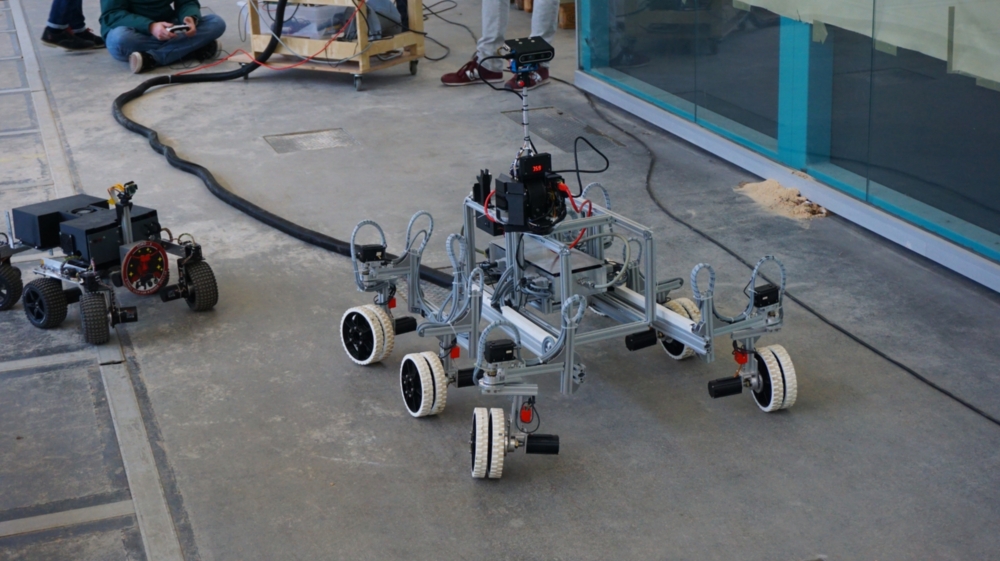
Die Mission für das Wintersemester 19/20 bestand in der funktionalen Umsetzung eines entfaltbaren Kameramasten für ein bestehendes Roversystem, um die Schnittstelle zur Navigation und Umgebungserfassung für autonome Raumfahrtsysteme zu schaffen. Die zwei Studierendenteams haben entlang der Entwicklung verschiedene Projektphasen durchlaufen, bevor die beiden Kameramasten „Palantir" (Parallactic Navigation Instrument) und „STEVE" (Stereo Vision Explorer) im Rahmen der „Rover Navigation Challenge" erstmals auf dem Rover in Betrieb genommen werden konnten. Mit Hilfe der übermittelten Daten des Kameramasten mussten die Teams während der Challenge den Rover dann durch eine unbekannte Testumgebung navigieren und entlang der Route mögliche Ziele und Hindernisse identifizieren. Nach einer heißen Testphase kurz vor der Challenge konnten beide Teams dann bei der Veranstaltung alle Missionsanforderungen erfolgreich innerhalb des vorgegebenen Zeitfensters erfüllen.
Zum Sommersemester 2020 geht das Modul mit der Lehrveranstaltung „Roversystemtechnik" in eine neue Entwicklungsrunde. Interessierte Master-Studierende können sowohl im Sommer-, als auch zur Praxisphase im Wintersemester in das Modul einsteigen. Weitere Informationen dazu sind im Modulhandbuch und/oder in Campus zu finden.