Am 8. April 2022 fand erneut die Abschlussveranstaltung der zweisemestrigen Lehrveranstaltung „Roverentwicklung für Explorationsaufgaben" statt. Im Rahmen dieser Lehrveranstaltung werden im Wintersemester für die Weltraum- und Explorationsrobotik relevante Systeme und Subsysteme in Form einer praktischen Projektarbeit in Teams von Studierenden entwickelt und betrieben. In diesem Jahr hatten die beiden Teams die Aufgabe, zwei Sensor- und Steuerungs-Pakete für den am IRS und in Kooperation mit der Firma vH&S weiterentwickelten Mikrorover Nanokhod zu entwickeln. Ziel war es dabei, die Steuerungselektronik, den Bordcomputer und unterschiedliche Sensoren funktional in der zentralen Nutzlastbox zu integrieren, um damit insbesondere die Umgebungscharakterisierung, Ziel- und Hinderniserkennung, sowie die eigene Lage und Zustandserfassung des Rovers ermöglichen. Zudem musste eine einfache wissenschaftliche Mission ausgedacht und geeignete Sensorelemente und Instrumente ausgesucht und implementiert werden.
Entlang der Systementwicklung mussten die Teams eine Vielzahl an hardware- und softwareseitiger Anforderungen erfüllen. Gerade für eine praktische Projektarbeit, mit einer Vielzahl an Schnittstellen zwischen den einzelnen Subsystemen und Komponenten, stellten die anhaltend einschränkenden Rahmenbedingungen eine zusätzliche Herausforderung dar. Durch strukturierte Umsetzung eines für die Lehrveranstaltung entwickelten Projektplans, die Nutzung einer Vielzahl verfügbarer, digitaler Plattformen sowie die hohe Motivation aller Beteiligten, konnte die Lehrveranstaltung mit der abschließenden „Rover Challenge" auch in diesem Jahrgang zu einem erfolgreich vollendet werden.
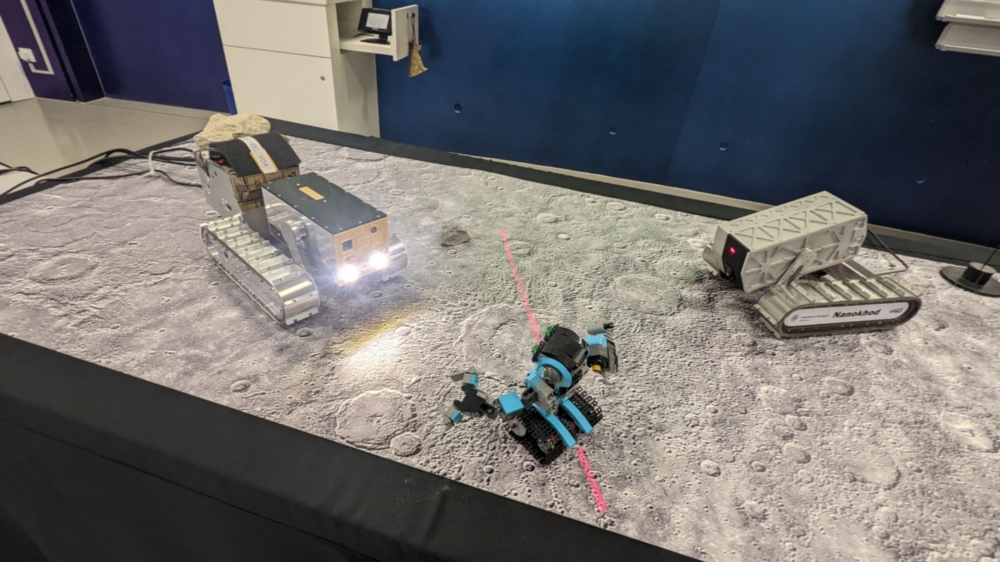
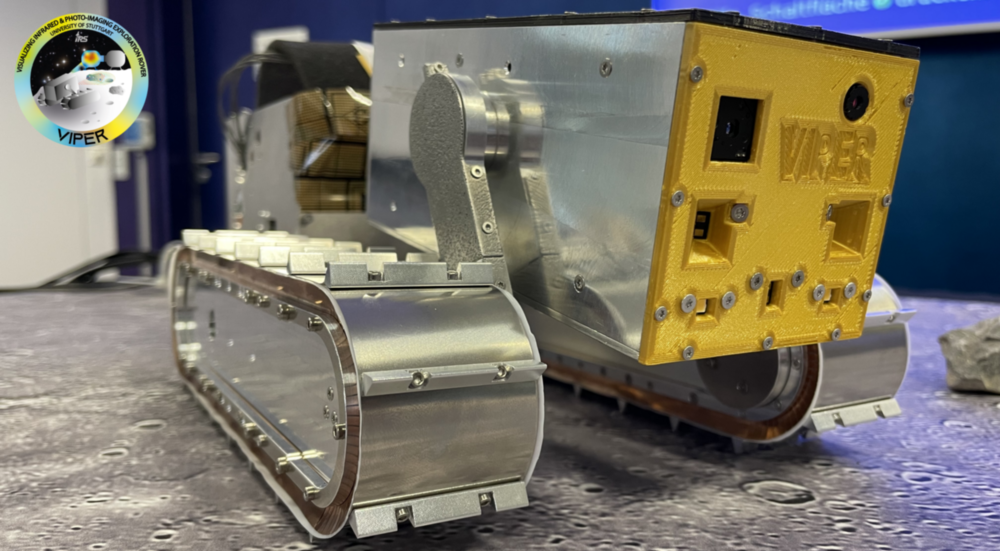
Die beiden diesjährigen Teams waren „VIPER“ (Visualizing Infrared & Photo-Imaging Exploration Rover) und „EPIC Nanokhod“ ().
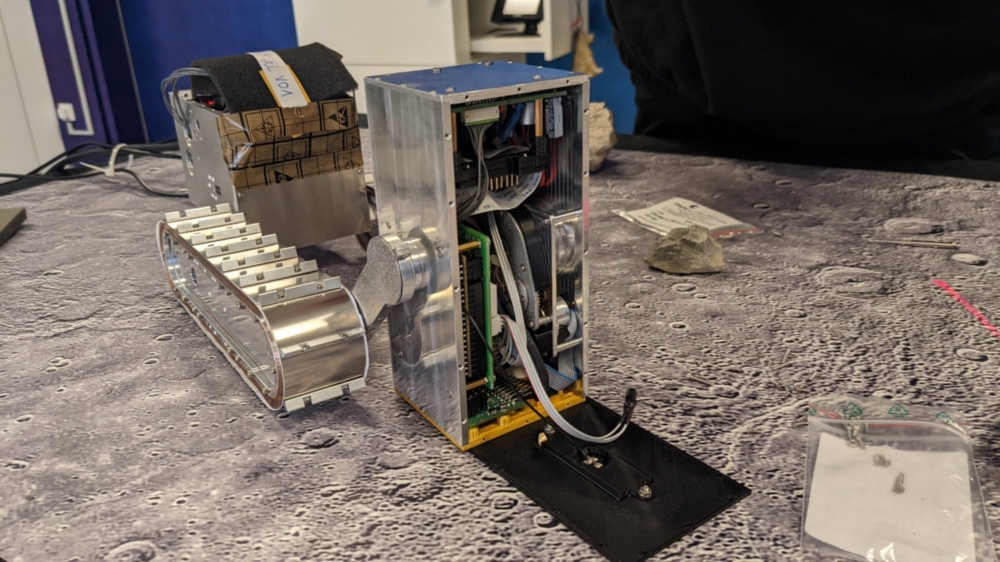
Team „VIPER“ entschied sich für Inertialsensorik (IMU), dreifache Time-of-Flight (ToF) Distanzmessung im Umfeld des Rovers (jeweils 5x4-pixelaufgelöst), Wärmebild- und RGB-Kameras, sowie Beleuchtungselemente für Navigation in dunkler Umgebung. Die Inertialmessung erlaubt Bewegungserkennung des Roverchassis, parallel zur Vortriebserkennung durch Odometrie-Sensoren im Kettenantrieb. Die Kombination von ToF, Wärmebild- und Farb/SW-Bild erlaubt die Erkennung von Hindernissen und die sichere Navigation um diese herum, sowie, falls nötig, die Entscheidung zum Klettern über vorhandene Hindernisse. Die Umgebungsmessung über längere Zeit und unter Berücksichtigung der Eigenbewegung der Roverplattform, was den Messbereich dynamisch erweitert, erlaubt zudem die Erstellung einer digitalen Karte der Umgebung. Die Eingabe von Befehlen und Ausgabe von Systemantworten und Messergebnissen erfolgte über IoT-Netzwerkkommunikation und wurde auf einer visuellen Oberfläche veranschaulicht.
Team „EPIC Nanokhod“ implementierte ebenfalls ToF-Sensoren und eine Farbbildkamera, sowie visuelle und UV-LEDs. Bei der wissenschaftlichen Mission handelt es sich um die die Erkennung fluoreszierender Mineralien durch Anregung durch diese Lichtquellen, was von der Kamera registriert wird. Zudem wurde ein durch Sponsoren bereitgestelltes, miniaturisiertes Spektrometer für die Analyse von Elementen implementiert.
Beide Teams mussten ihr System unter Vorgabe des Mikrorovers Nanokhod als Integrationsplattform entwickeln und mit dessen Energie- und Daten-Netzwerk interagieren. Hierzu musste ein RS-485 Datenbus zur Kommunikation mit anderen, im Mikrorover verteilten Subsystemen eingerichtet werden.
Beide Teams verwendeten für die Steuerung und Datenverarbeitung an Bord des Rovers handelsübliche Single-Board-Computer, auf welchen für die Interaktion zwischen Rover und Bodenstation IoT-Schnittstellen verwendet wurden. Dies war ebenfalls eine Randbedingung an die Teams, um ein einheitliches Software-Fundament auf minimaler Rechenkapazität zu schaffen.
Wir gratulieren den beiden Teams „Viper“ und „EPIC Nanokhod" zum erfolgreichen Abschluss der Lehrveranstaltung und bedanken uns herzlich für die hohe Motivation bei der Umsetzung des Projekts.