The robotics projects of the institute
Research Fields
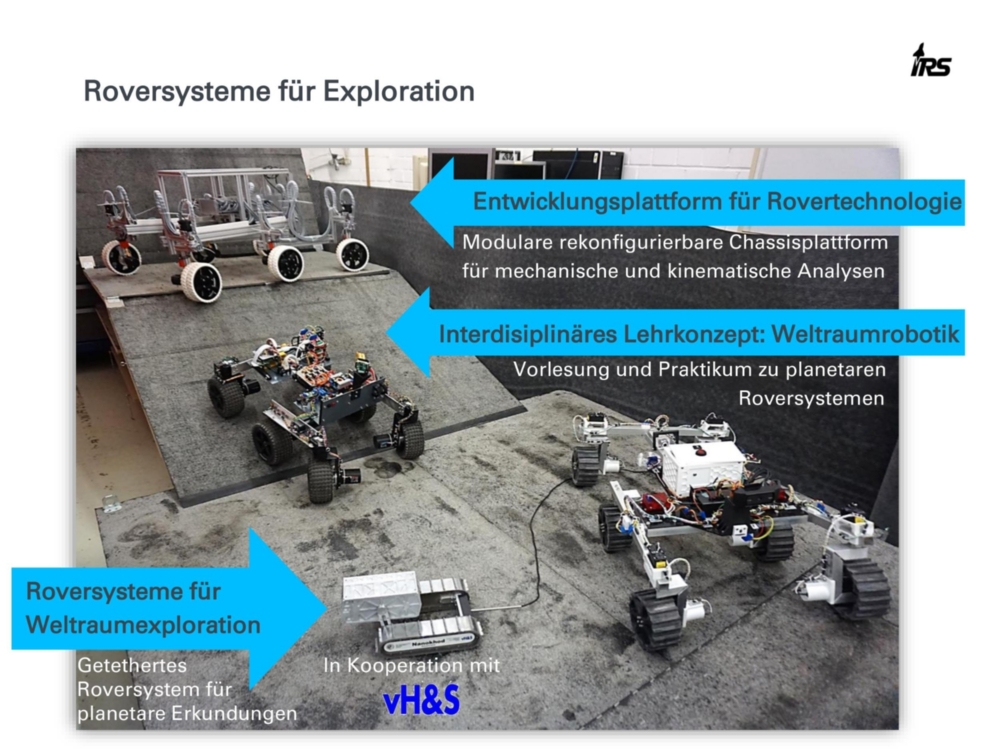
Design & Operation of Robotic Systems for Space Exploration
- Lunar Micro Rover development with industry partners
- Rover Chassis Design & Performance Analyses
- Robotic Arms for Sample & Instrument Handling
- Deployable 2 DOF Camera Mast for environmental perception & navigation
Mechanism Design, Integration & Testing
- Miniaturised Tether Recoil Mechanism development
- Sealed micro Drive Unit Design
- Deployment mechanism for a DLR LIBS instrument
Sensory Component Implementation & Operation
- Depth & Lidar Camera instrumentation for navigation & tracking
- Micro Radar Sensos Development together within research partners
- Environmental perceptionmodeling & feedback monitoring
Software Development
- Robotic systems control framework for space operation
- Interface to autonomous operation of robotic systems
Test environment
- Modular test track setup for mobility analyses
- Small fine grain test bed
- Lunar Regolith Simulant test chamber
Simulation Environment
- Control algorithm verification
- Physics environment simulation
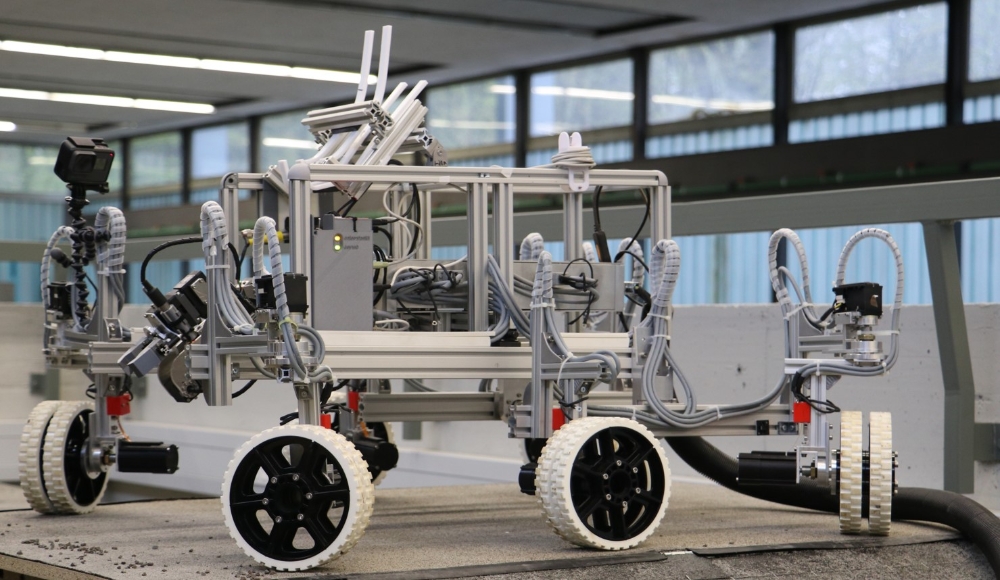
Modular Rover Chassis Platform
Contact
Moritz Gewehr
M.Sc.
Sabine Klinkner
Prof. Dr.-Ing.Professor of satellite technology